

Design method for high speed pantograph multiple-target robust H-infinity controller
A design method and target-robust technology, applied in the field of high-speed pantograph multi-target robust H∞ controller design, can solve problems such as fluctuation, difficulty in state measurement, and the inability of the actuator to output control force, and achieve guaranteed robustness. Stickiness and stability, the effect of improving control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
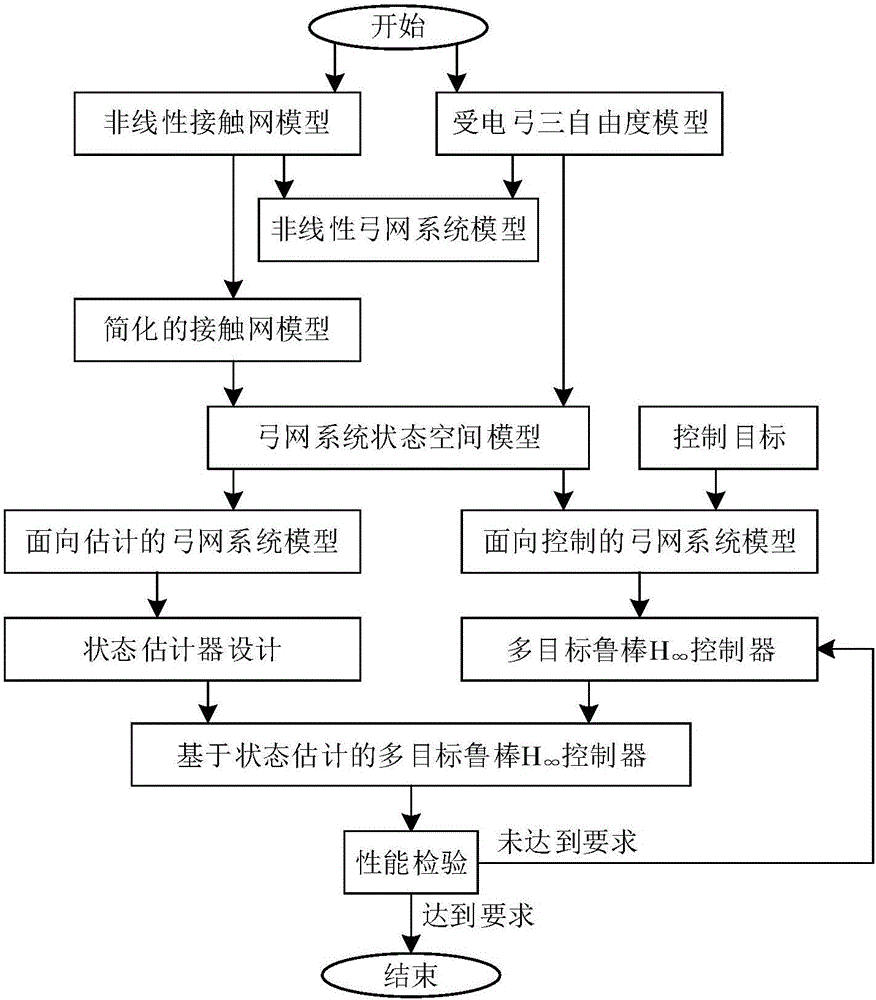
[0064] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The estimator of the present invention can obtain various state information of the pantograph, and use this as a feedback signal, the multi-objective control makes the designed controller more useful for practical application, and the robust H∞ control makes the robustness of the controller improved ensure. The inventive method is described in detail as follows:
[0065] 1. Establishment of the mathematical model of the pantograph-catenary system
[0066] 1. Establishment of nonlinear finite element mathematical model of catenary
[0067] Based on the parameters of the Beijing-Tianjin line catenary, the contact line and the catenary cable are regarded as nonlinear cable elements, and the hanging string is regarded as a nonlinear rod element, and the finite element model of the catenary is established, which is written as the basic dyn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More