

Underwater unmanned ship control system
A technology for control systems and unmanned ships, applied in control/adjustment systems, radio wave measurement systems, attitude control, etc., can solve problems such as insufficient flexibility, inability to obtain underwater information and control robots in real time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
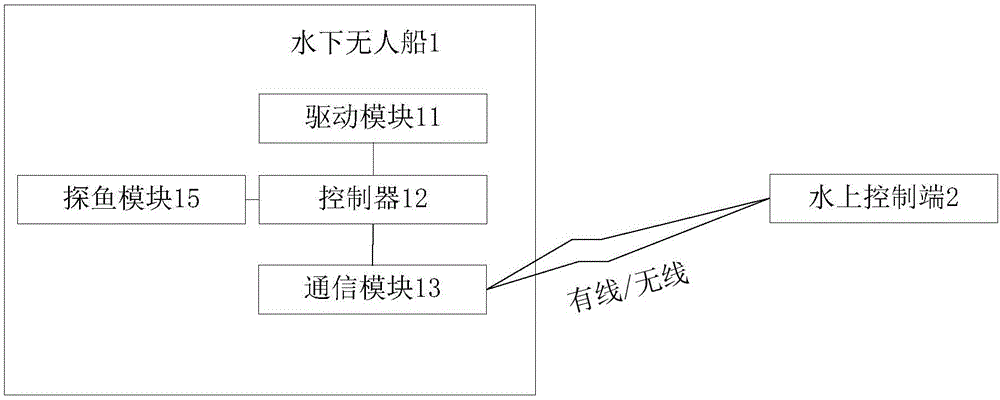
[0049] Such as figure 1 As shown, the embodiment of the present invention proposes a control system for underwater unmanned ship 1, including, sealed zero-buoyancy underwater unmanned ship 1 and water control terminal 2, and a control system is provided in underwater unmanned ship 1. device 12, drive module 11, fish detection module 15 and communication module 13, the drive module 11, fish detection module 15 and communication module 13 are all connected to the controller 12, and the fish detection module 15 sends the fish detection results to the controller 12, the controller 12 uploads to the water control terminal 2 through the communication module, and the controller 12 uploads the fish detection result of the fish detection module 15 to the water control terminal 2 through the communication module 13, and receives the information sent by the water control terminal 2. The control command adjusts the work among the modules according to the control command and uses the drive...
Embodiment 2
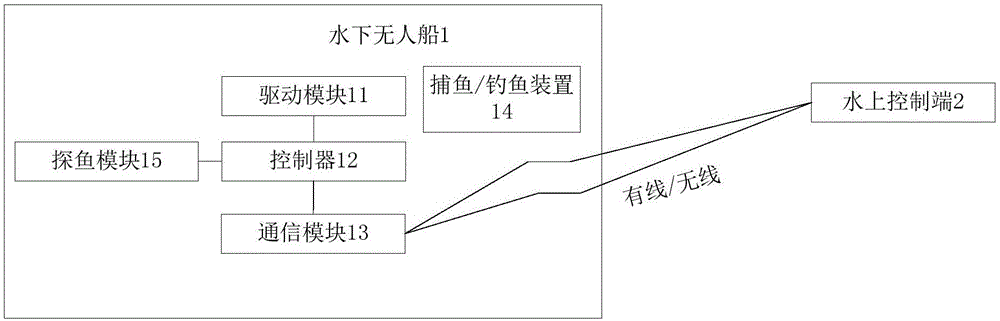
[0053] Such as figure 2 Shown, on the basis of above-mentioned embodiment, be provided with fishing / fishing device 14 on described underwater unmanned vessel 1, wherein, described fishing device top is provided with fishhook, and described fishing device top is provided with can A hook mechanism for hanging a fishhook, the hook mechanism is provided with a notch, and the fishhook is connected with a fishing line, and part of the fishing line is fixed through the notch. When the fish bites the fishhook, the fishhook can be detached from the hook by external force mechanism, and then use the fishing line to retrieve the fish.
[0054] Wherein, the fishing device can be a spear gun, after locking the target fish, the fish can be shot with the spear gun, or the fishing device can be a fishing net, after the target fish is locked, the fishing net can be launched to catch the target fish.
[0055] The fishing device is mainly composed of a suspension arm, a buoyancy block, and a h...
Embodiment 3
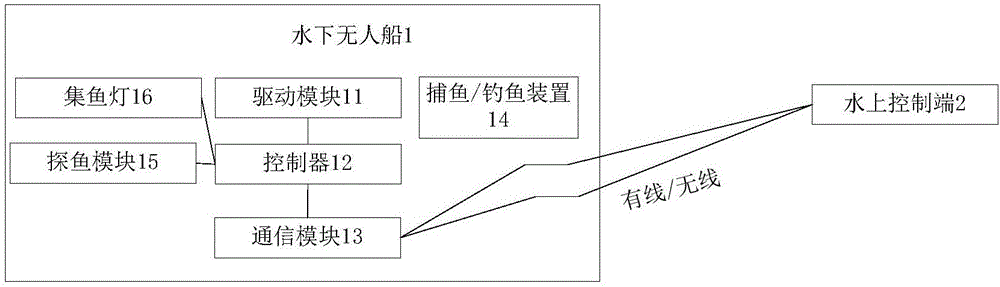
[0057] On the basis of the above embodiments, the fish detection module is a sonar module and / or an image acquisition module, the sonar module is used to detect the underwater environment, the location and depth of fish schools, and the image acquisition module is used for recording and Take an underwater image, and set the fishhook in front of the image acquisition module;
[0058] Preferably, lighting lights are set around the image acquisition module, and the lighting lights can be adjusted according to the light intensity of the surrounding waters. .
[0059] The underwater unmanned ship of the present invention has a sonar module and an image acquisition module at the same time. The existing unmanned fishing ships generally do not have a camera. Even if there is a camera, they can only collect images near the water surface. According to the approximate location and approximate quantity of objects detected by the sonar signal, the user needs to judge the type, specific lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More