

Road longitudinal and lateral section obtaining method based on LiDAR point cloud
An acquisition method and road technology, applied in the field of surveying and mapping, can solve the problem of large amount of point cloud data that cannot be read uniformly, and achieve the effect of avoiding low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
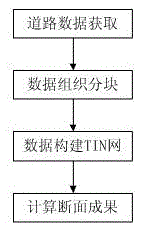
[0044] figure 1 A schematic flow diagram of a method for acquiring road longitudinal and cross-sections based on LiDAR point clouds provided in this embodiment, such as figure 1 As shown, the method includes the following steps:
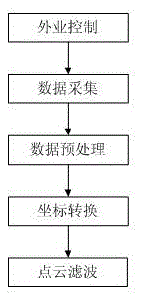
[0045] Road data acquisition: After field control, data acquisition, data preprocessing, coordinate conversion, point cloud filtering and other steps to generate filtered road ground point cloud data;
[0046] Data organization and block: manage the point cloud data in blocks according to the appropriate distance grid;
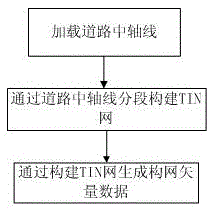
[0047] Data construction TIN network: according to the existing road central axis, construct TIN network according to a specific distance buffer;
[0048] Calculation of section results: Generate vertical and horizontal section files based on mileage files.
[0049] Such as figure 2 As shown, a method for acquiring road vertical and horizontal sections based on LiDAR point cloud, the road data acquisition: After field control, d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More