

Position compensation control method for hydraulic servo system of corrugated roller rolling mill
A hydraulic servo system, compensation control technology, applied in tension/pressure control, rolling force/roll gap control, metal rolling, etc., can solve the roll gap fluctuation, affecting the production quality of composite panels, hydraulic system pressure fluctuation and impact and other problems, to achieve the effect of reducing pressure fluctuation, simple and easy-to-understand control method, and realizing collaborative control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0022] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other implementations obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention.
[0023] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
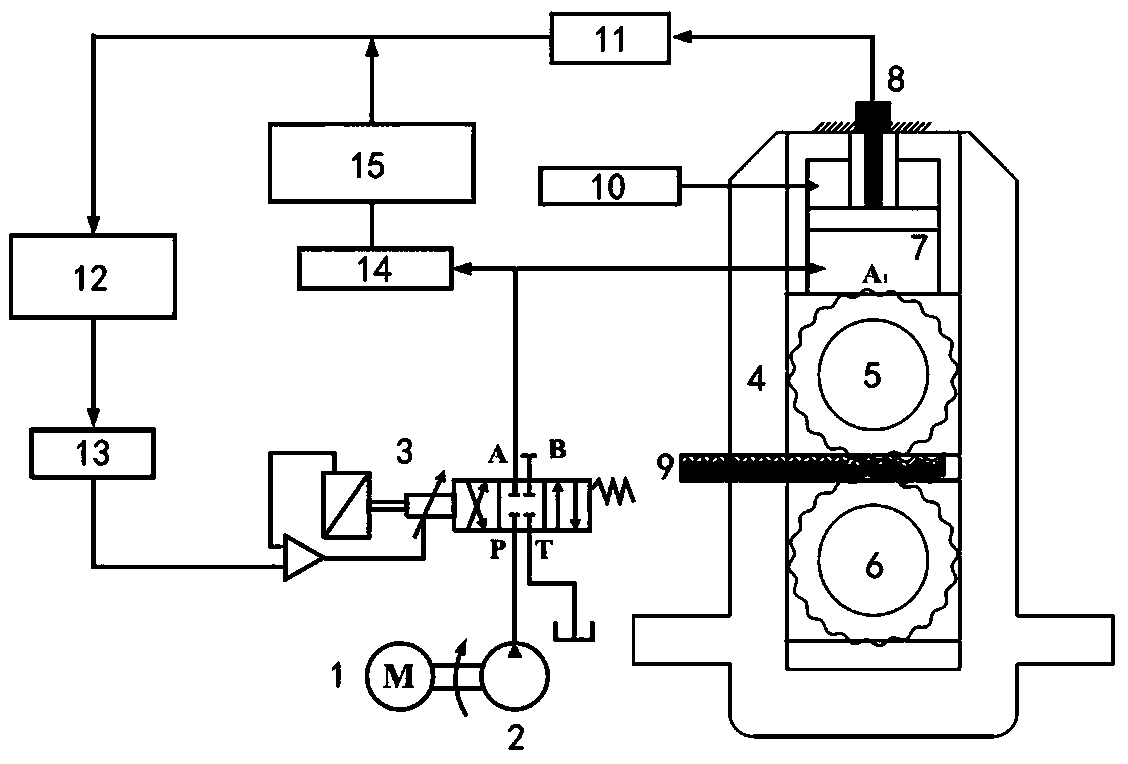
[0024] A position compensation control method for a hydraulic servo system of a corrugated rolling mill,
[0025] The hydraulic servo system of the corrugated rolling mill includes a corrugated rolling mill, the piston rod end of the servo hydraulic cylinder 7 of the corrugated rolling mill is fixed on the frame 4 of the corr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More