

Tree contour detection method and device based on unmanned aerial vehicle obstacle avoidance radar
A contour detection, UAV technology, applied in measurement devices, radio wave measurement systems, radio wave reflection/re-radiation, etc. Achieve the effect of accurate detection, avoid tree collision events, and increase false alarm rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
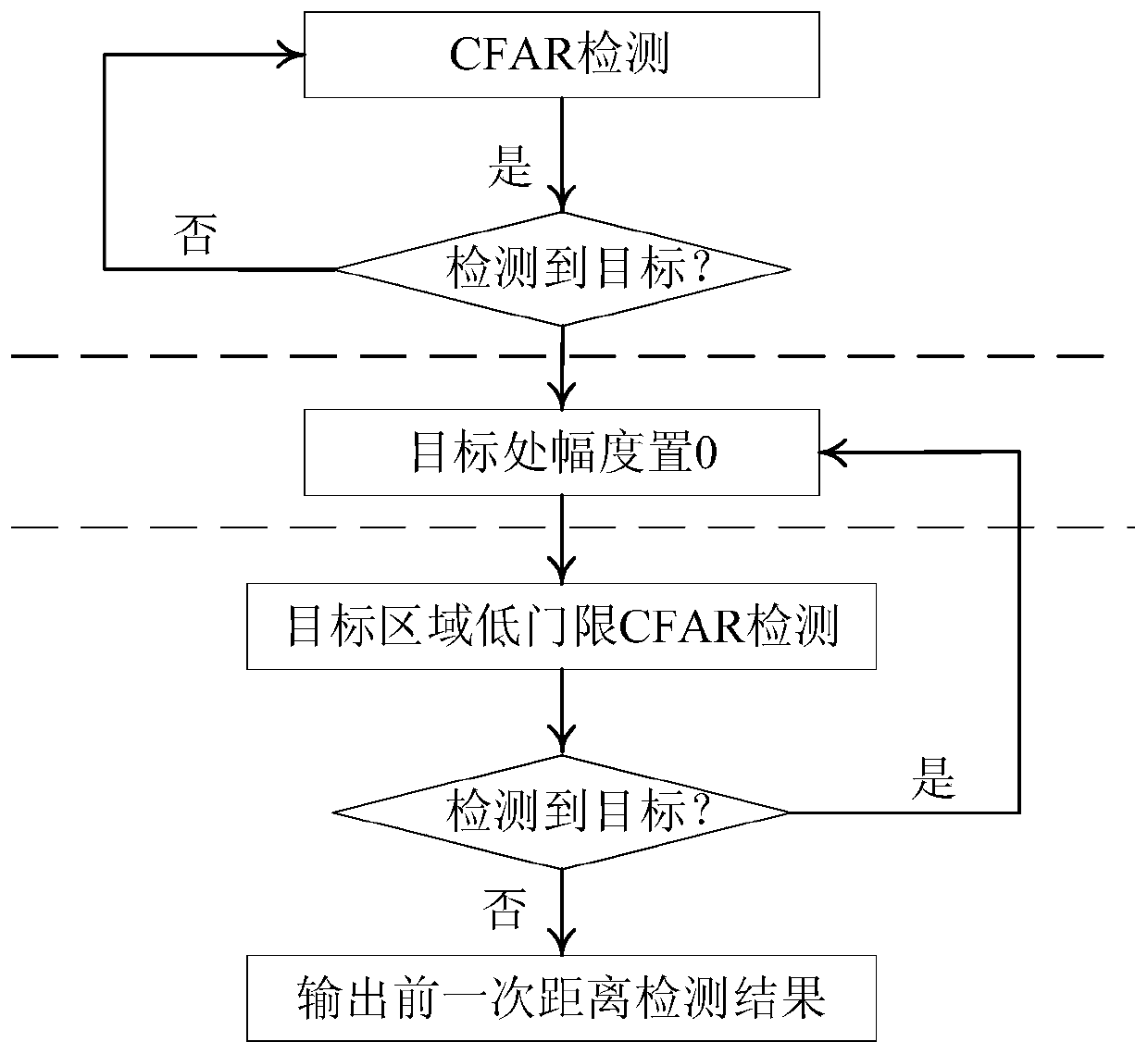
[0038] Such as image 3 As shown, the steps of the tree outline detection method based on the UAV obstacle avoidance radar in this embodiment include:
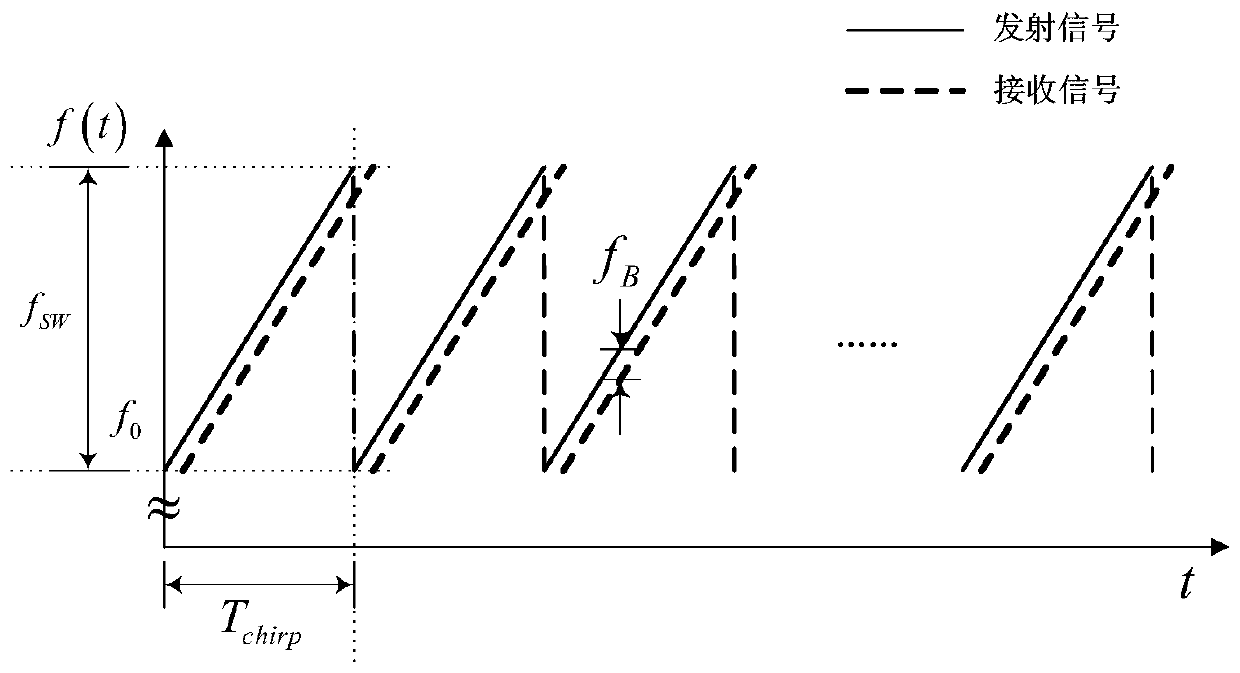
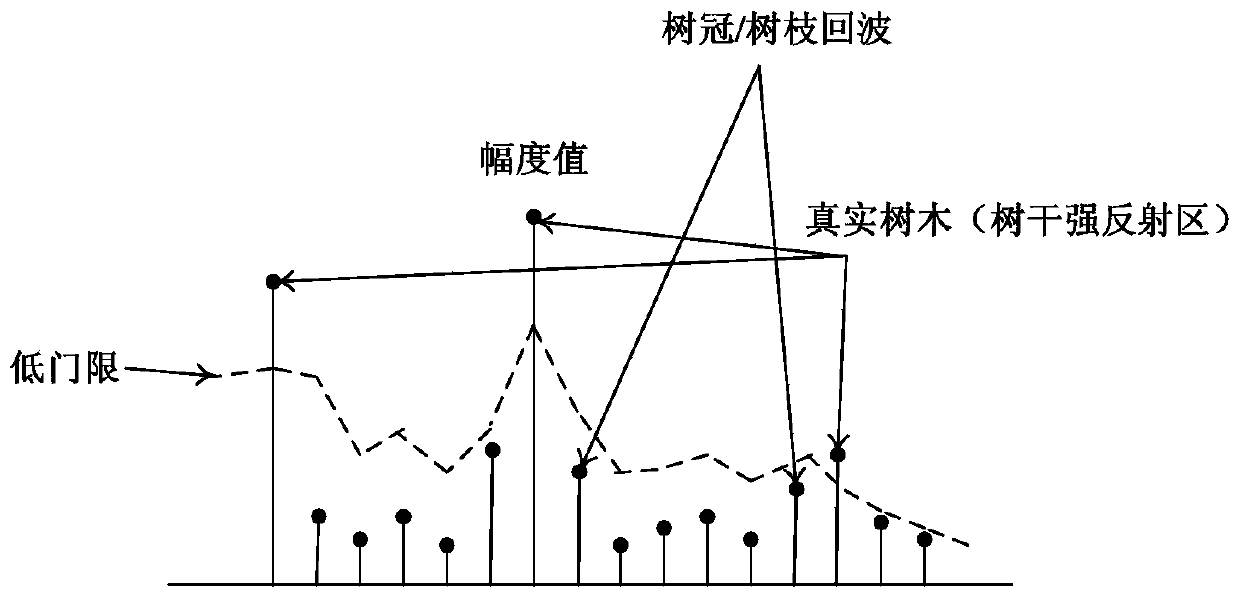
[0039] S1. A CFAR detection: Obtain the echo signal returned by the UAV obstacle avoidance radar, and use the first threshold value to perform CFAR detection on the obtained echo signal. When the target is detected and it is a tree, go to step S2;
[0040] S2. Detection target processing: remove the currently detected target, obtain the processed echo signal, and transfer to step S3;
[0041] S3. Secondary CFAR detection: use the second threshold value obtained by reducing the first threshold value to perform CFAR detection on the processed echo signal. When the target is detected, the target tree is determined...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More