

An underwater natural gas pipeline leakage automatic sealing robot and its application method
A technology of natural gas pipelines and robots, which is applied in the direction of manipulators, pipe components, mechanical equipment, etc., can solve the problems of increasing operational difficulty, economic loss, and difficult operation, and achieve good protection effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
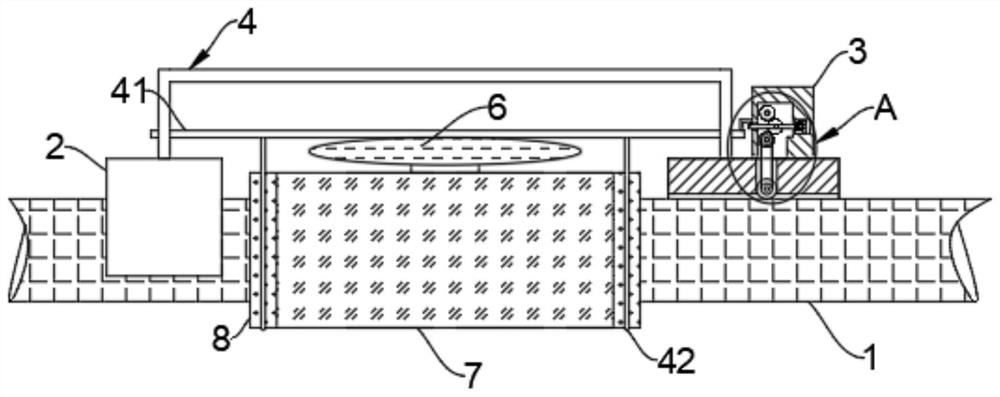
[0033] Such as Figure 1-5 As shown, an underwater natural gas pipeline leakage automatic sealing robot and its use method include a support mechanism 2 connected with a pipeline 1, such as Figure 4 As shown, the support mechanism 2 is composed of a fixed cylinder 21 , a fixed wheel 22 and a support wheel 23 .
[0034] The section of the fixing cylinder 21 is a 2 / 3 arc structure, and the fixing cylinder 21 has a three-section hinge structure, so that the fixing cylinder 21 can be conveniently fixed on the pipeline 1 .
[0035] The fixed wheel 22 is rotatably connected to both sides of the fixed cylinder 21 and is rollingly connected with the pipeline 1 along the axial direction of the pipeline 1. The supporting wheel 23 is located at the top of the pipeline 1 and is rollingly connected with the pipeline 1 along the axial direction of the pipeline 1. 21 turn to connect.
[0036] Both the support wheel 23 and the fixed wheel 22 can ensure that the support mechanism 2 can easily...
Embodiment 2
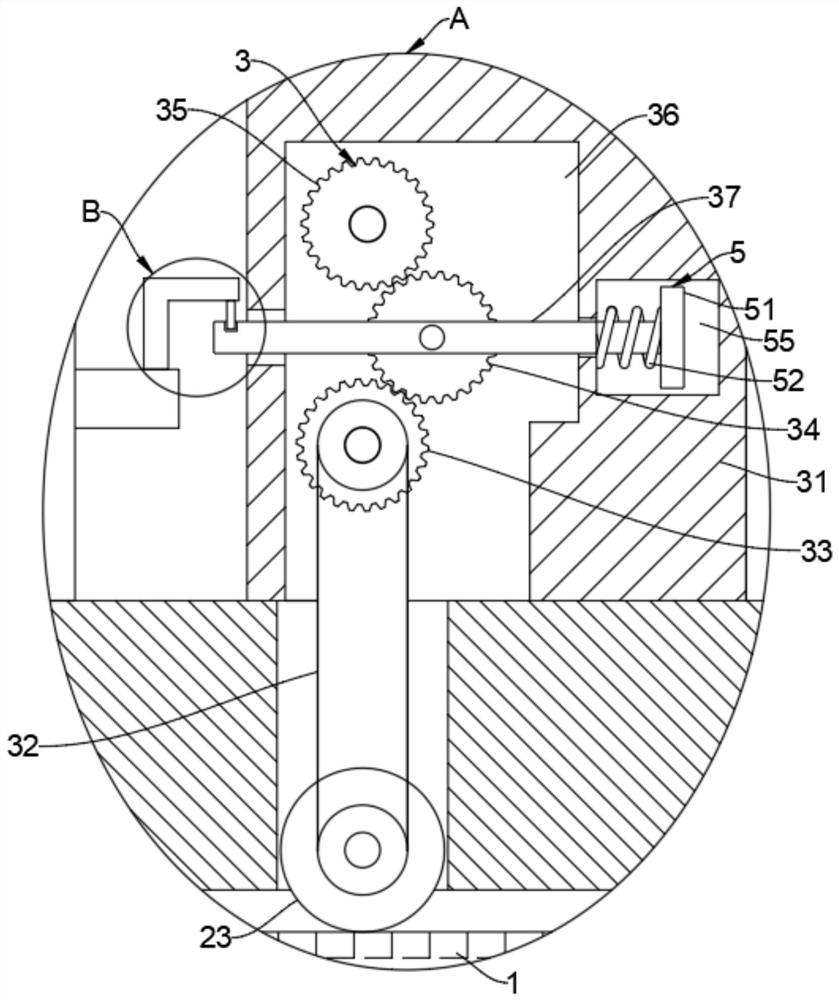
[0052] like Figure 6-7 As shown, the difference between this embodiment and Embodiment 1 is that: a vertical rack 43 is fixedly connected to the top of the support mechanism 2, the rack 43 is fixedly connected to the connecting piece 4, and the sliding rod 37 is rotatably connected to a rotating cylinder 44 , the rotating cylinder 44 is fixedly connected with a rotating gear 45 and a take-up wheel 46 , and the take-up wheel 46 is fixedly connected with the stay cord 42 .
[0053] And then realize that when the sliding bar 37 slides upwards, the rotating gear 45 cooperates with the tooth bar 43 and then can realize that the rotating gear 45 drives the rotating cylinder 44 to rotate, and then realizes that the rotating cylinder 44 drives the take-up pulley 46 fixedly connected therewith to rotate, and the take-up The wheel 46 has a larger diameter, and then it can be realized that when the sliding rod 37 slides a certain distance, the take-up wheel 46 will make the pulling dist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More