

Urban rail train adhesion control method and system based on frame control mode
A technology for urban rail trains and control methods, applied in control systems, vector control systems, control drives, etc., can solve problems such as increased wheel-rail wear, large adhesion torque, and impact on passenger comfort.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0063] Compared with the existing sticky control, the single-axis dynamic model is adopted, and the single-axis model is only suitable for the situation where one converter drives one electric shaft, which is inconsistent with the actual operation of the urban rail train under the frame control mode, thus The given adhesion control strategy cannot be effectively applied to the actual train. This embodiment proposes an adhesion control method for urban rail trains based on rack control mode, and performs adhesion control based on the dual-axis dynamic model and traction motor load model of urban rail trains under rack control mode, which can be effectively applied to actual trains among.
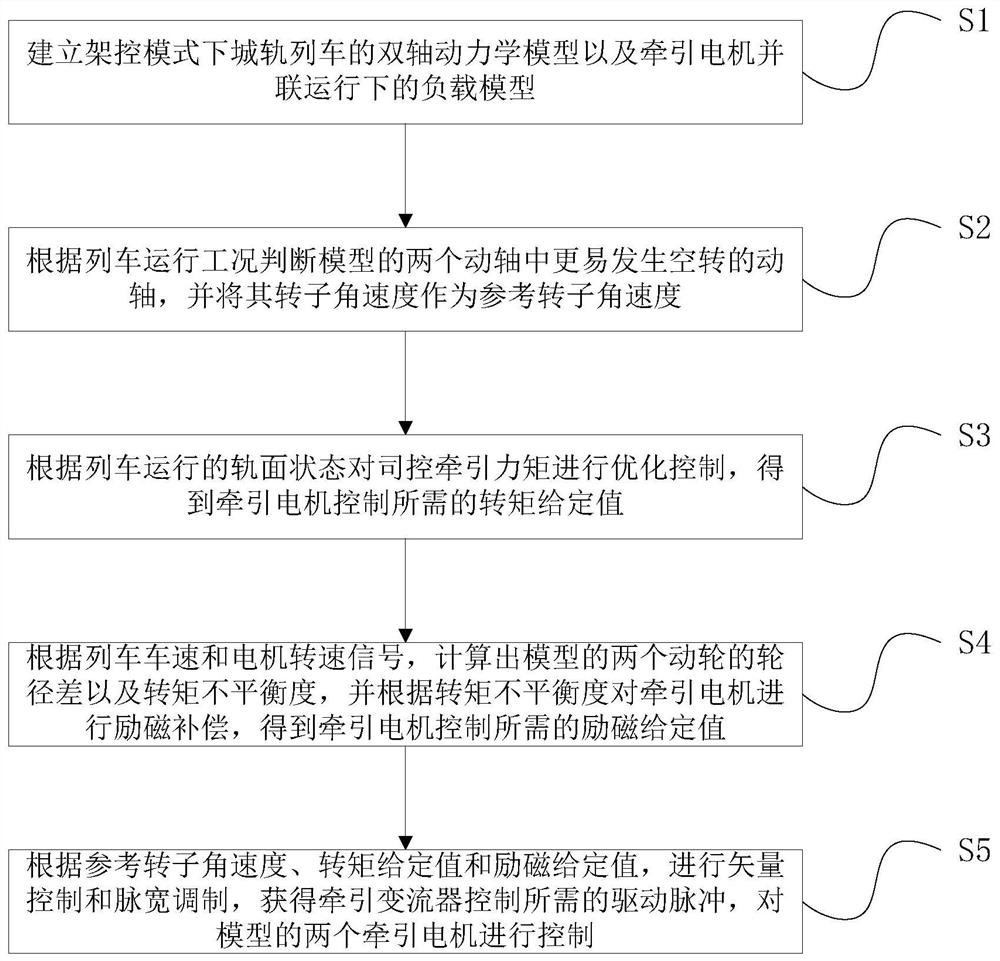
[0064] Specific as image 3 As shown, the adhesion control method of this embodiment includes the following steps:
[0065] Step S1, establishing a dual-axis dynamic model of the urban rail train in rack control mode and a load model of traction motors running in parallel to simulate the re...
Embodiment 2
[0178] This embodiment proposes an urban rail train adhesion control system based on rack control mode, such as Figure 7 As shown, the system of this embodiment includes a re-adhesion optimization control module, a parallel motor control module, a reference rotor angular velocity selection module, a motor vector control module and a simulation module.
[0179] The simulation module of this embodiment is used to establish the dual-axis dynamic model of the urban rail train under the rack control mode and the load model under the parallel operation of the traction motors, so as to simulate the real operation of the urban rail train and the real load model of the traction motor under the rack control mode. The load; that is, the simulation module of this embodiment is configured to execute step S1 of the first embodiment above.
[0180] The reference rotor angular velocity selection module of this embodiment is used to judge the moving axis of the two moving axes of the model th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More