

Industrial robot trajectory tracking system and method adopting neural network iterative compensation
An industrial robot and neural network technology, applied in the field of motion trajectory accuracy improvement system and industrial robot trajectory tracking system, can solve problems such as inability to adjust parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0068] Embodiments of the present invention are as follows:
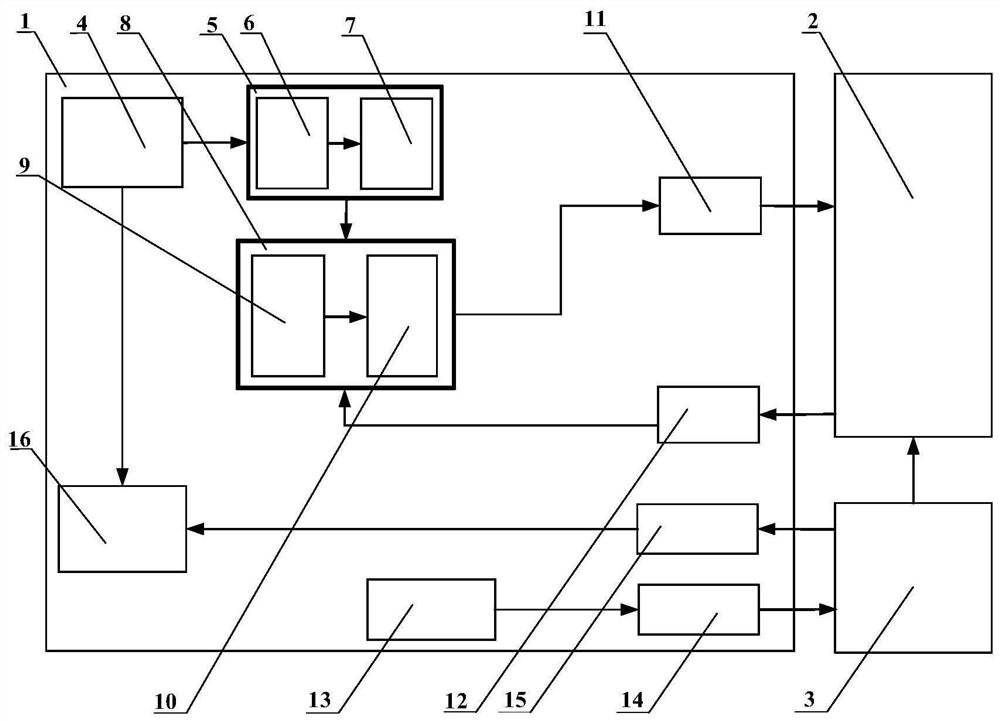
[0069] The specific implementation system is as figure 1 As shown, it includes industrial robot 2, measuring device 3 and track tracking system 1, track tracking system 1 is connected with industrial robot 2 and measuring device 3 respectively, industrial robot 2 is connected with measuring device 3, industrial robot 2, measuring device 3 and track The tracking system 1 jointly constructs a closed-loop industrial robot motion trajectory tracking system; the end flange of the industrial robot 2 is equipped with a moving target ball matched with the measuring equipment.
[0070] Trajectory tracking system 1 includes trajectory planning module 4, inverse solution compensation module 5, neural network PID module 8, robot input interface 11, robot output interface 12, measurement control modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More