

Hybrid traffic flow collaborative optimization control method based on model predictive control
A model predictive control, mixed traffic technology, applied in the field of traffic engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
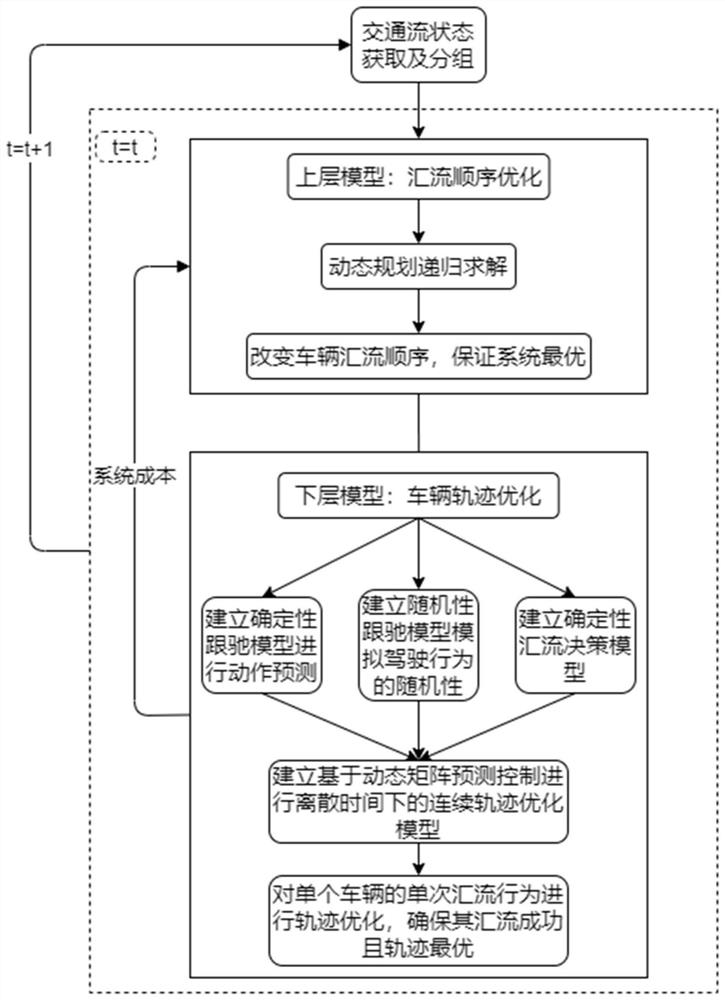
[0128] The method of the present invention adopts a double-layer optimization model based on model predictive control to carry out collaborative decision-making control of mixed traffic flow, and is suitable for different traffic in the mixed traffic flow under the direction of two one-way one-way roads with intersections and no vehicle driving signal before the intersection. Scenarios include merging vehicles on highway ramps, merging vehicles at intersections, and vehicles passing through intersections. Now the method of the present invention will be further described based on the situation of highway ramp vehicle merging (in this example, the ramp is the X road, and the main road is the Y road). figure 1 is the frame diagram of the collaborative optimization control method for mixed traffic flow based on model predictive control in this example. The following is a detailed description step by step:
[0129] S1. Determine road grouping optimization sections and perform time...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More