

Vehicle multi-objective coordinated self-adapting cruise control method
A technology of adaptive cruise and control method, applied in the field of vehicle longitudinal dynamics control, can solve the problem of restricting the driver's ability to follow the car, the difference is large, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0055] The present invention proposes a vehicle multi-objective coordinated adaptive cruise control method based on model predictive control theory, which includes the following steps: 1. According to the specific requirements of vehicle multi-objective coordinated adaptive cruise control, that is, effective tracking performance, low fuel consumption Consumption and driver characteristics, design multi-objective performance indicators and I / O constraints, and establish corresponding multi-objective optimal control problems; 2. Use MTC ACC control law rolling time domain to solve multi-objective optimal control problems, and use the optimal open-loop The control quantity is fed back to realize closed-loop control.
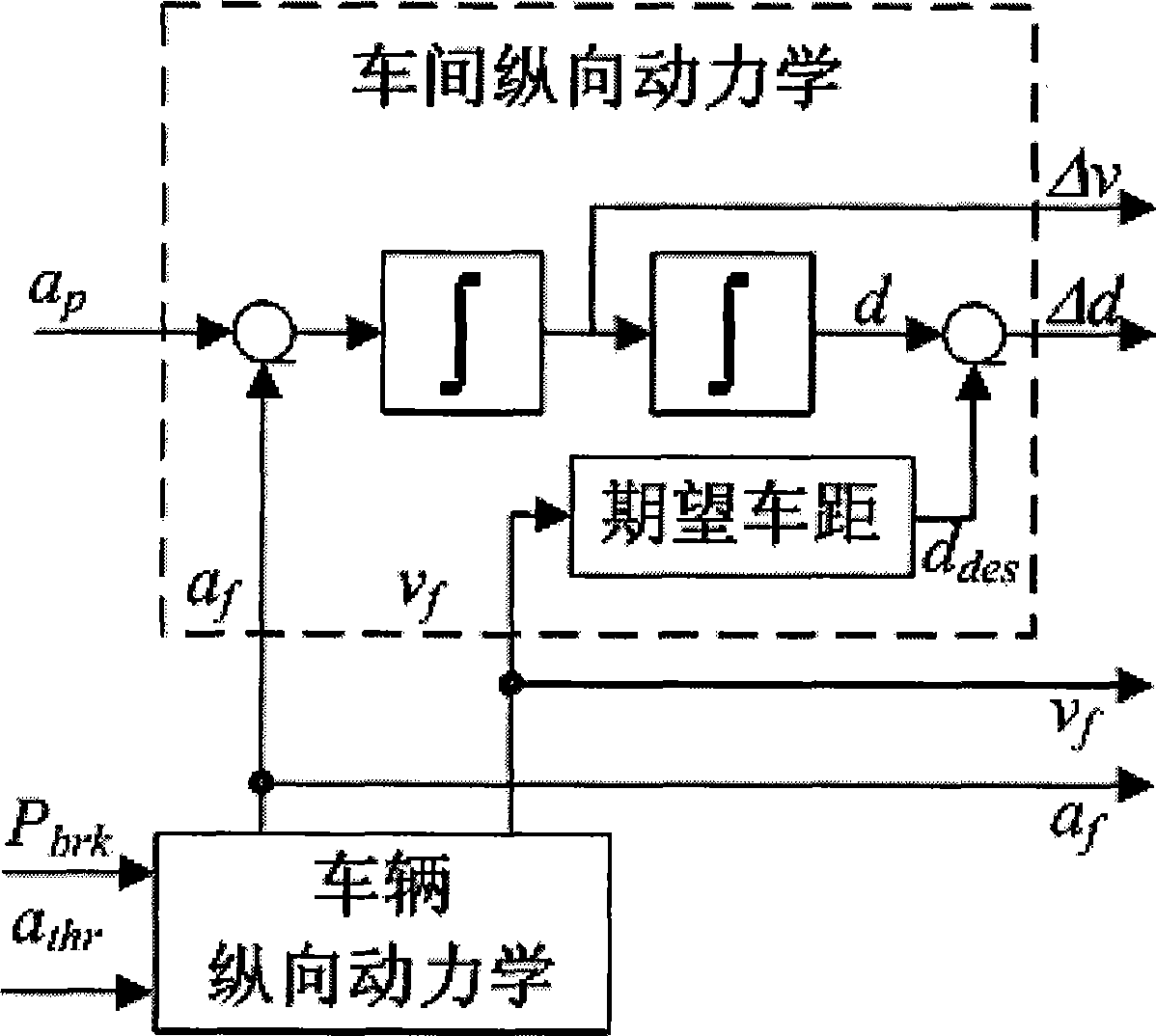
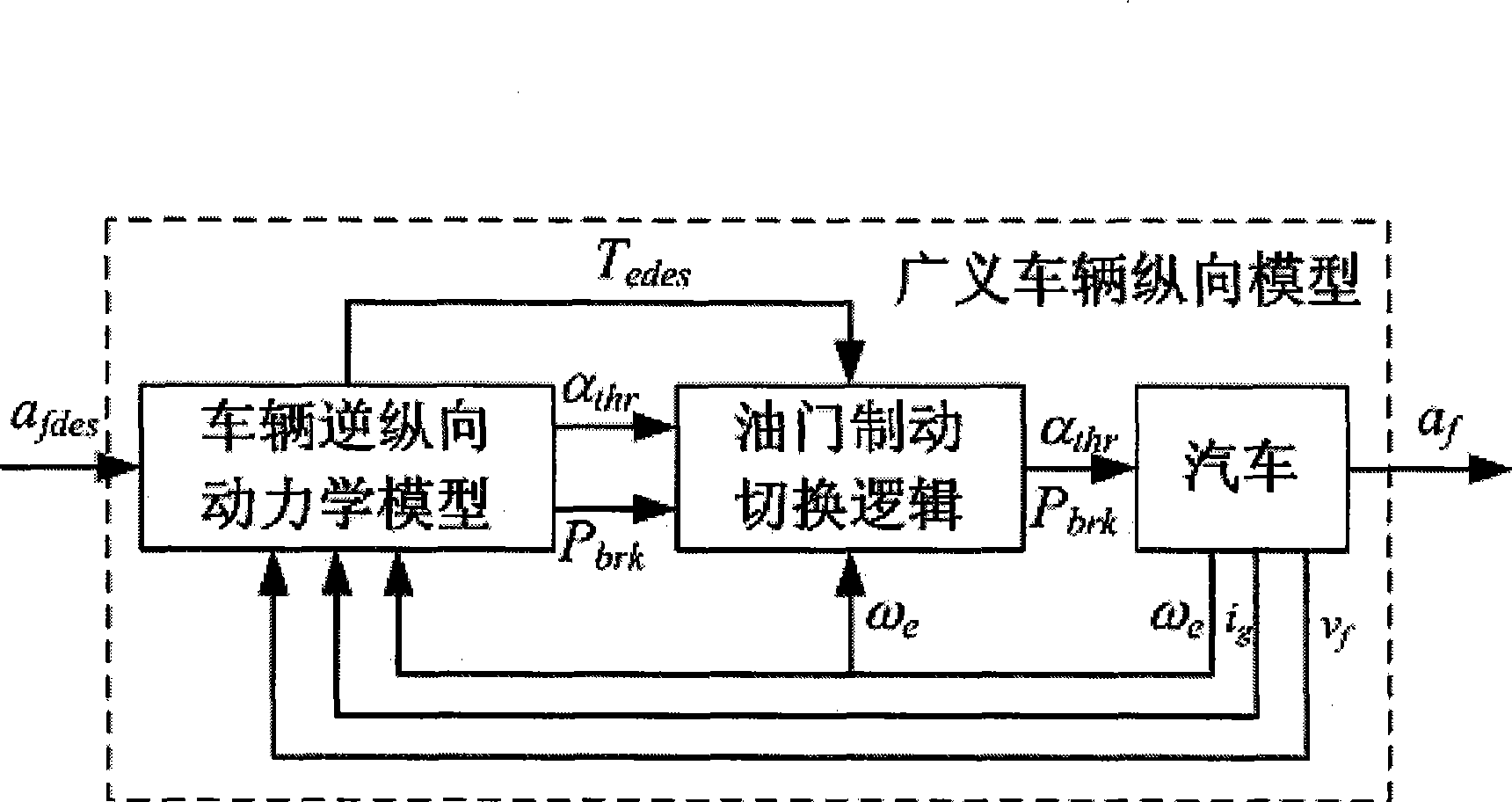
[0056] The control method based on the above step 1 and step 2 of the present invention includes the following four parts: 1. The longitud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More