

Vehicle multi-objective coordinated self-adapting cruise control method
A technology of adaptive cruise and control method, applied in the field of vehicle longitudinal dynamics control, can solve the problems of restricting the driver's ability to follow the car, the difference is large and so on
Inactive Publication Date: 2010-12-01
TSINGHUA UNIV
View PDF0 Cites 5 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Since the driver's characteristics are non-linear and vary widely from individual to individual, it is difficult for the linear model to accurately reflect the longitudinal driving behavior of human-vehicle coupling under various working conditions. ability
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
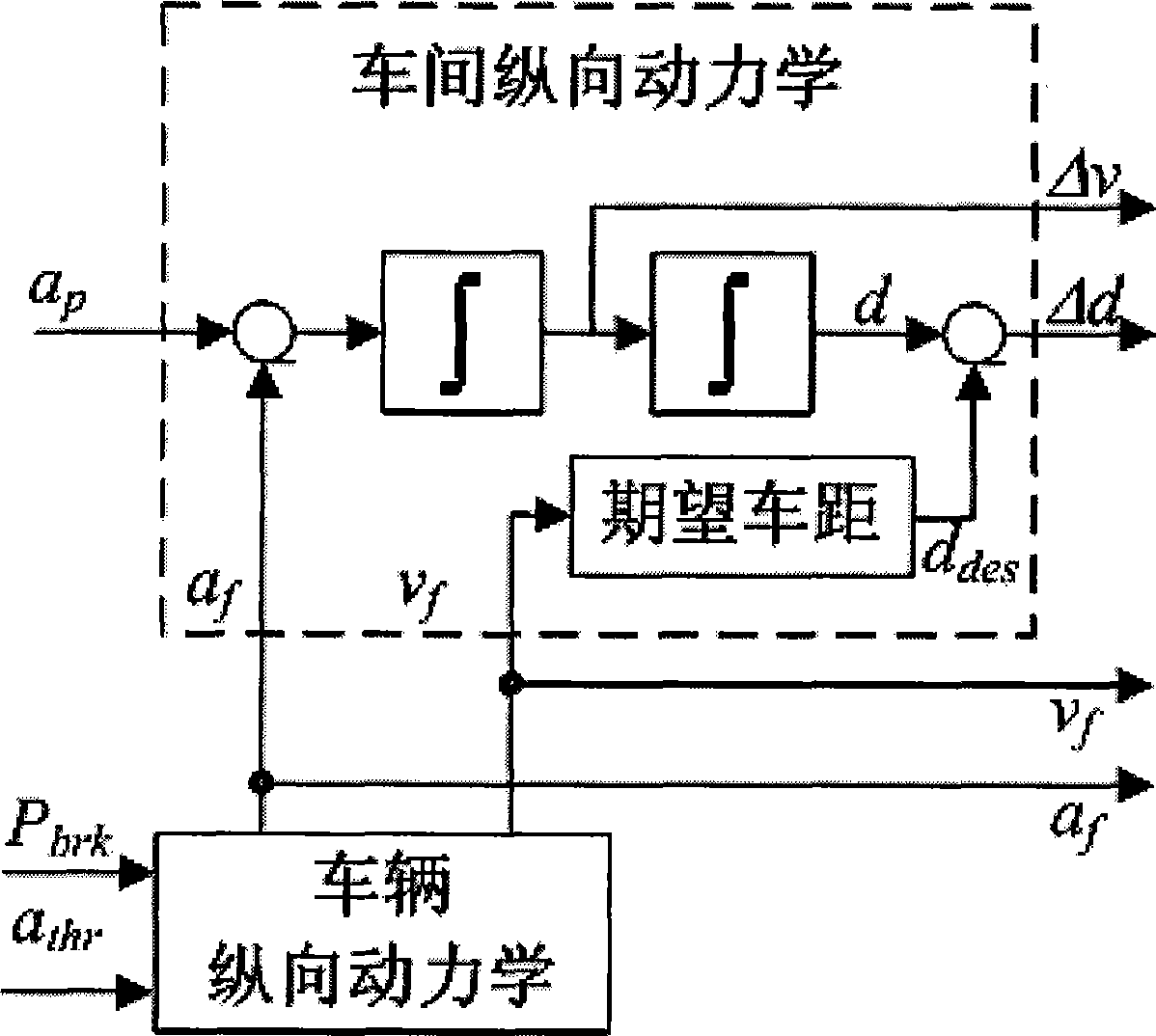
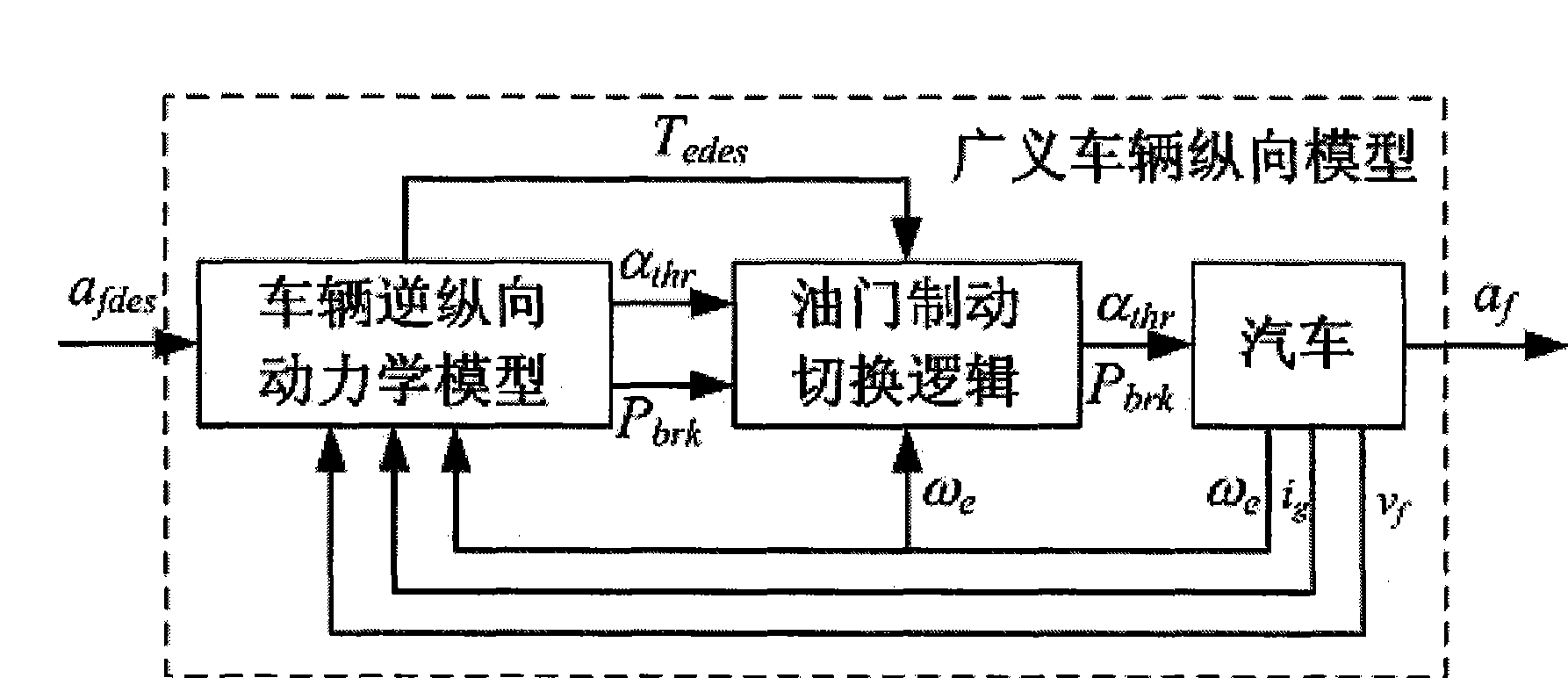
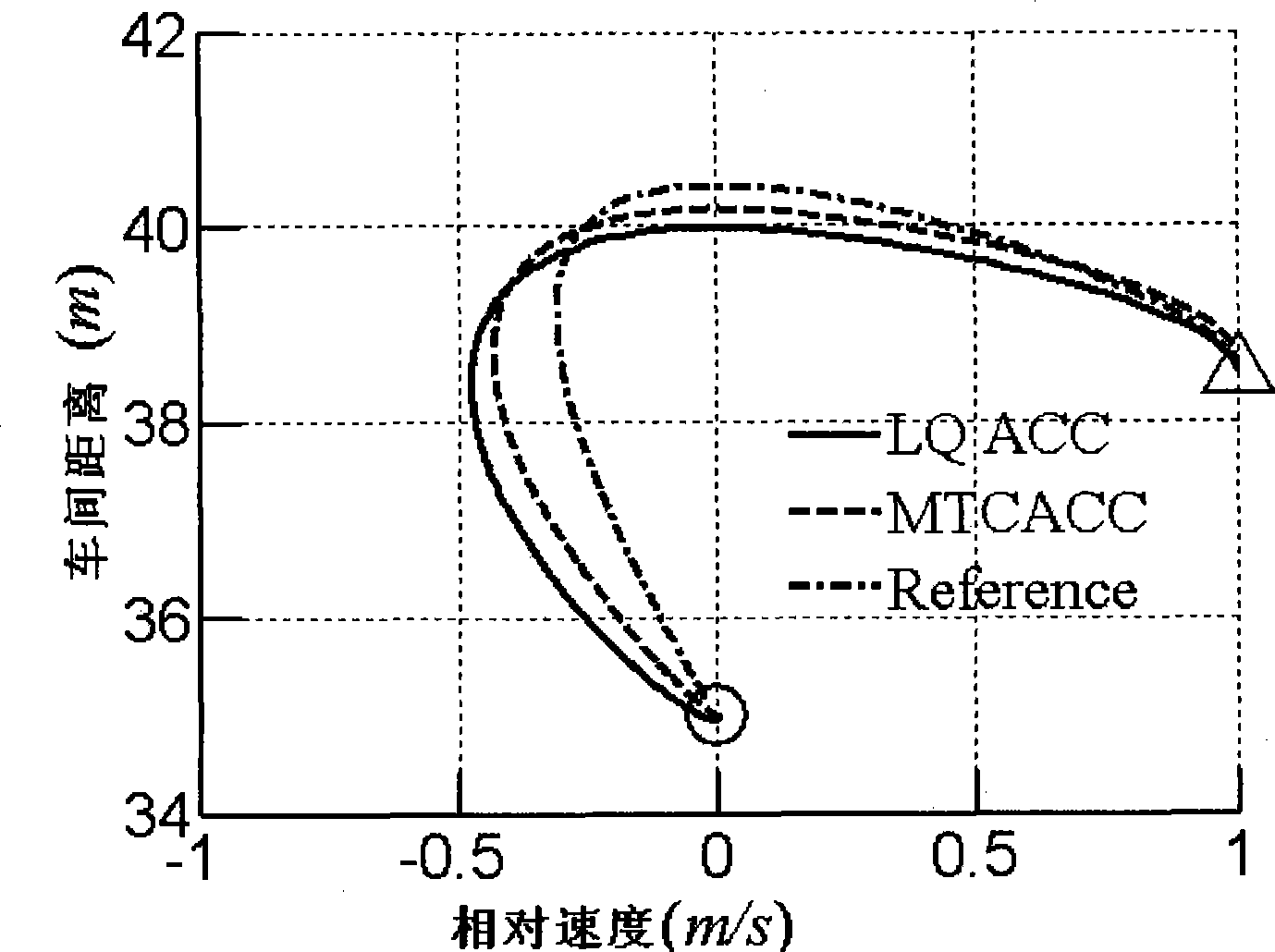
The invention relates to a multi-objective coordination-typed self-adaptive cruise control method for a vehicle, comprising the following steps: 1) according to the detail requirements of the multi-objective coordination-typed self-adaptive cruise control for a vehicle, the performance indicators and I / O restriction of MTC ACC are designed, and multi-objective optimization control problem is established; and 2) MTC ACC control law rolling time domain is used for solving the objective optimal control problem, and the optimal open-loop control quantity is used for carrying out feedback and achieving closed-loop control. Based on the steps, the control method comprises the following four parts of contents: 1. the modeling for the longitudinal dynamics of a traction system; 2. the performanceindicators of MTC ACC; 3. the I / O restriction design of MTC ACC; and 4. solution by the MTC ACC control law rolling time domain. By constructing multi-objective optimization problem, the control method not only solves the contradiction among the fuel economy, the track performance and the feeling of the driver, moreover, on the same simulation conditions, compared with the LQ ACC control, the control method simultaneously reduces the fuel consumption and vehicle tracking error of the vehicle, and achieves the multi-objective coordinating control function.
Description
A vehicle multi-objective coordinated adaptive cruise control method technical field The invention relates to a vehicle longitudinal dynamics control method, in particular to a vehicle multi-objective coordinated adaptive cruise control method based on model predictive control theory. Background technique As an important part of the driver assistance system, the adaptive cruise control system (ACC, Adaptive Cruise Control System) has the potential to reduce driver fatigue, improve vehicle driving safety and increase traffic flow, and has attracted extensive attention from various research institutions and automobile manufacturers. . Most of the existing ACC systems are only designed for tracking performance targets, but with the gradual popularization of ACC systems and the increase in oil prices, in addition to the necessary tracking performance, low fuel consumption has also become an important goal pursued by ACC vehicles. In addition, in order to enhance the driver's ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B60W30/14B60W30/17
Inventor李克强李升波王建强鹈川洋白东升
OwnerTSINGHUA UNIV