

Positioning and navigation system and method of indoor robot
An indoor robot and navigation system technology, applied in surveying and navigation, two-dimensional position/channel control, navigation, etc., can solve the problems of high cost, complex structure, troublesome detection, etc., and achieve the effect of low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
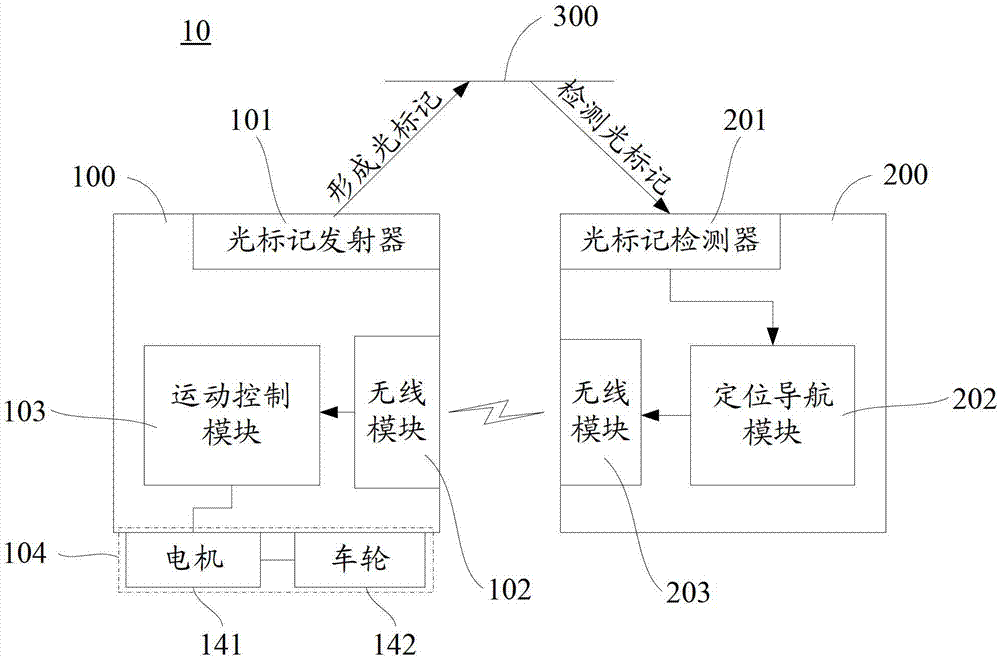
[0027] Such as figure 1 Shown is a block diagram of the positioning and navigation system of an indoor robot of an embodiment. The positioning and navigation system 10 includes a freely movable robot 100 and a fixed positioning navigator 200 . The robot 100 moves freely within its motion area, and the positioning navigator 200 performs positioning and navigation for the robot 100 .
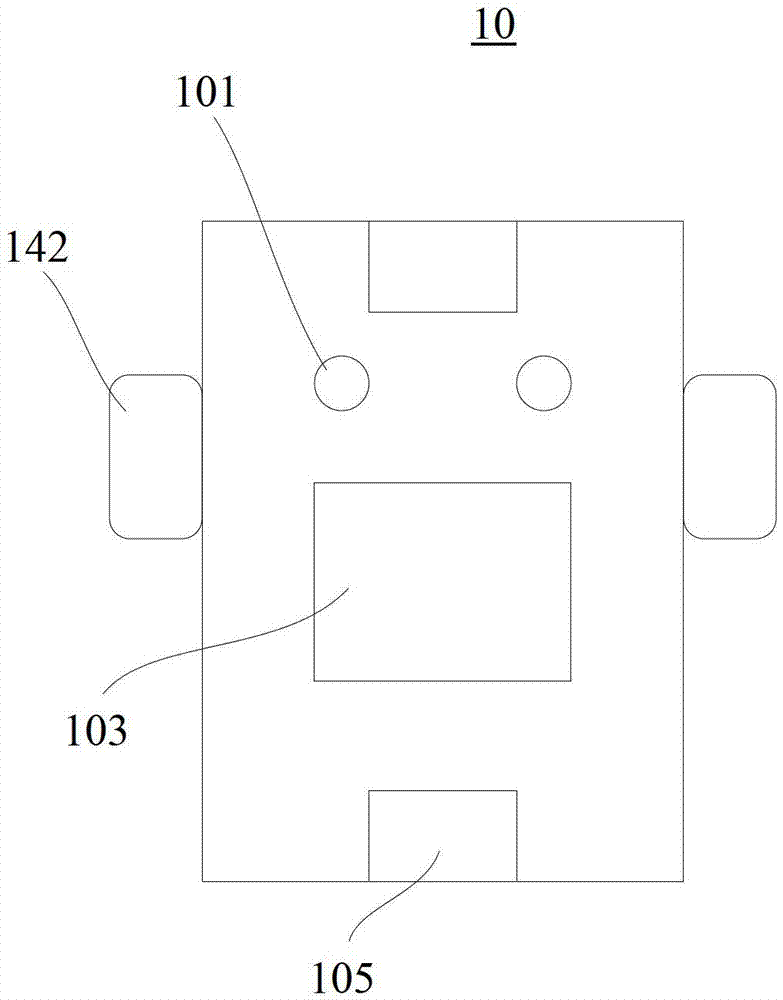
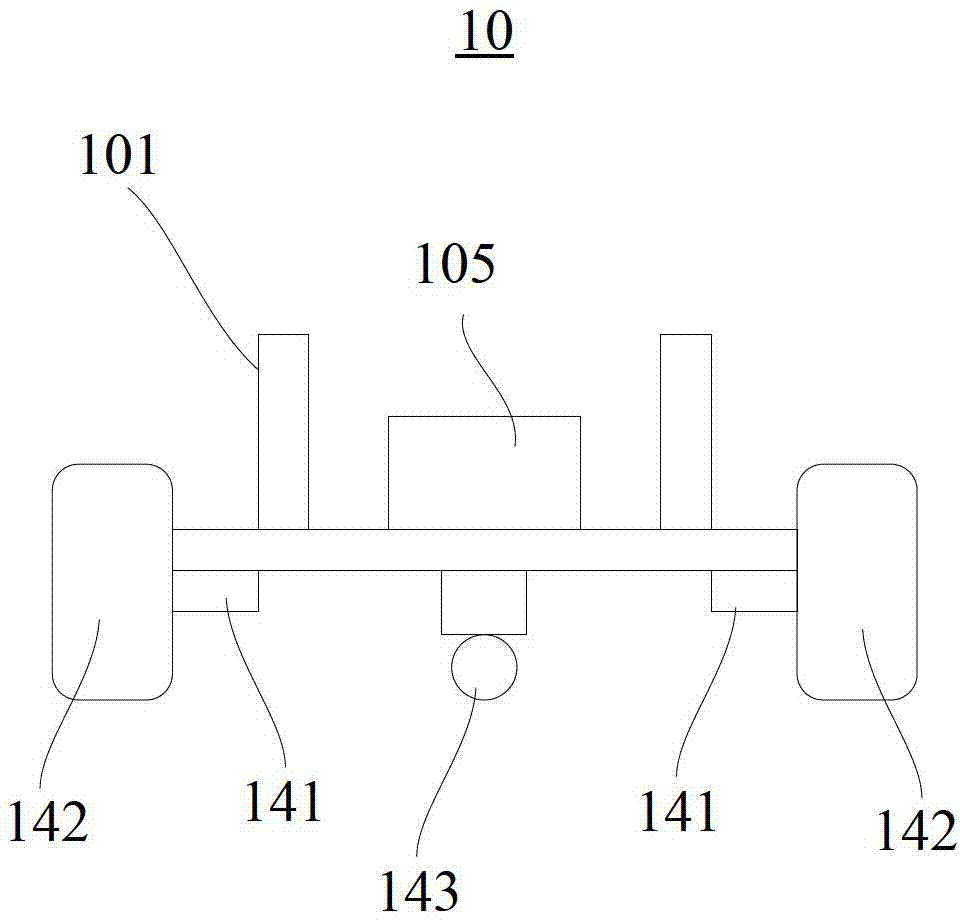
[0028] The robot 100 includes a light marker transmitter 101 , a wireless module 102 , a motion control module 103 and a motion mechanism 104 .
[0029] The light mark transmitter 101 is used to emit light to the fixed surface 300 to form a light mark. When the robot moves, it drives the light mark emitter 101 to move, and the position of the light mark on the fixed surface 300 also moves accordingly. The position of the optical marker on the fixed surface 300 is in one-to-one correspondence with the position of the robot 100 in its motion area, so by determining the position of the optical mark...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More