

Method for estimating and compensating coupling torque of aerial remote sensing inertially stabilized platform
An inertial stabilization platform and aviation remote sensing technology, applied in the field of flight platforms, can solve problems such as insufficient suppression capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
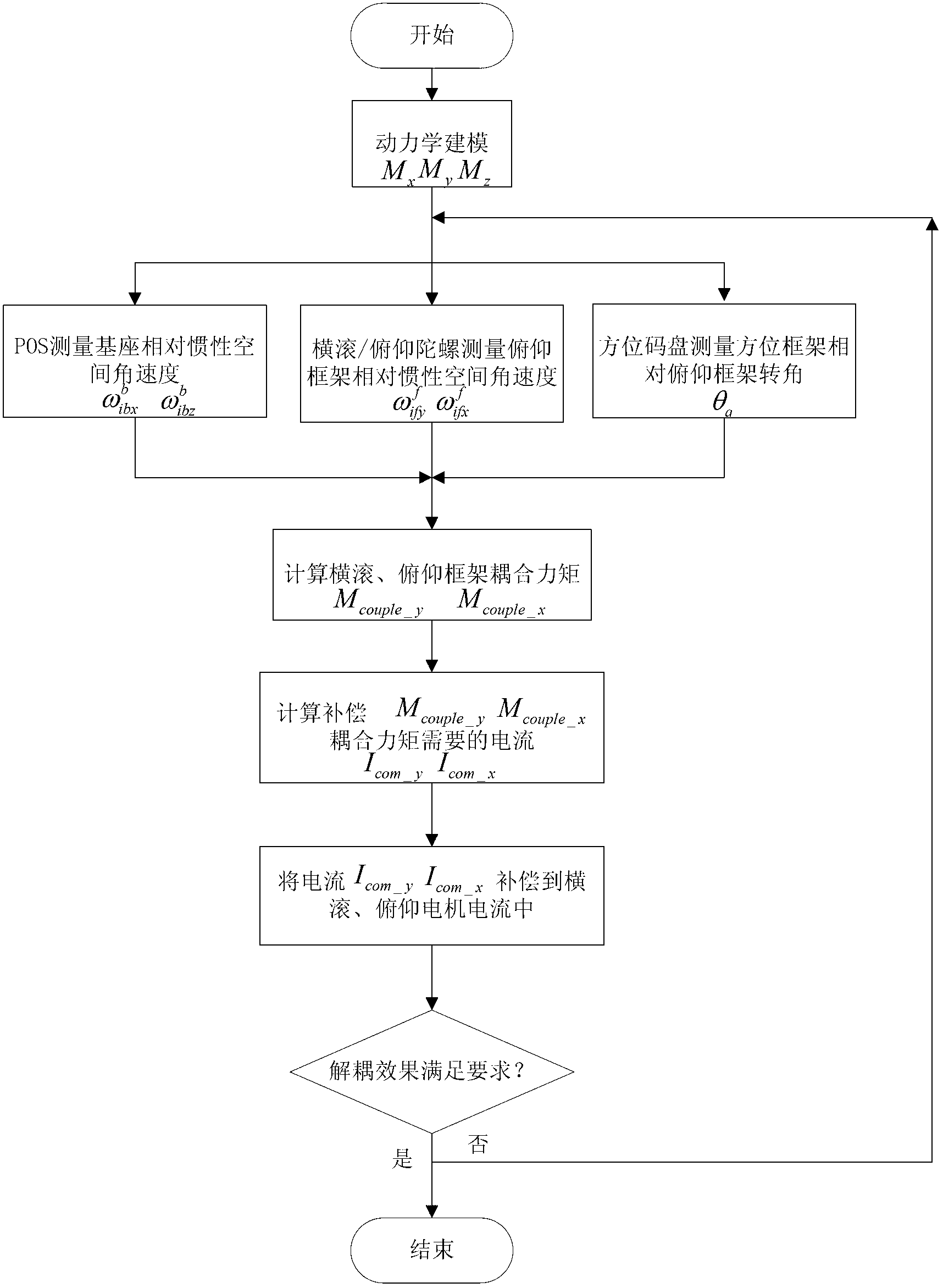
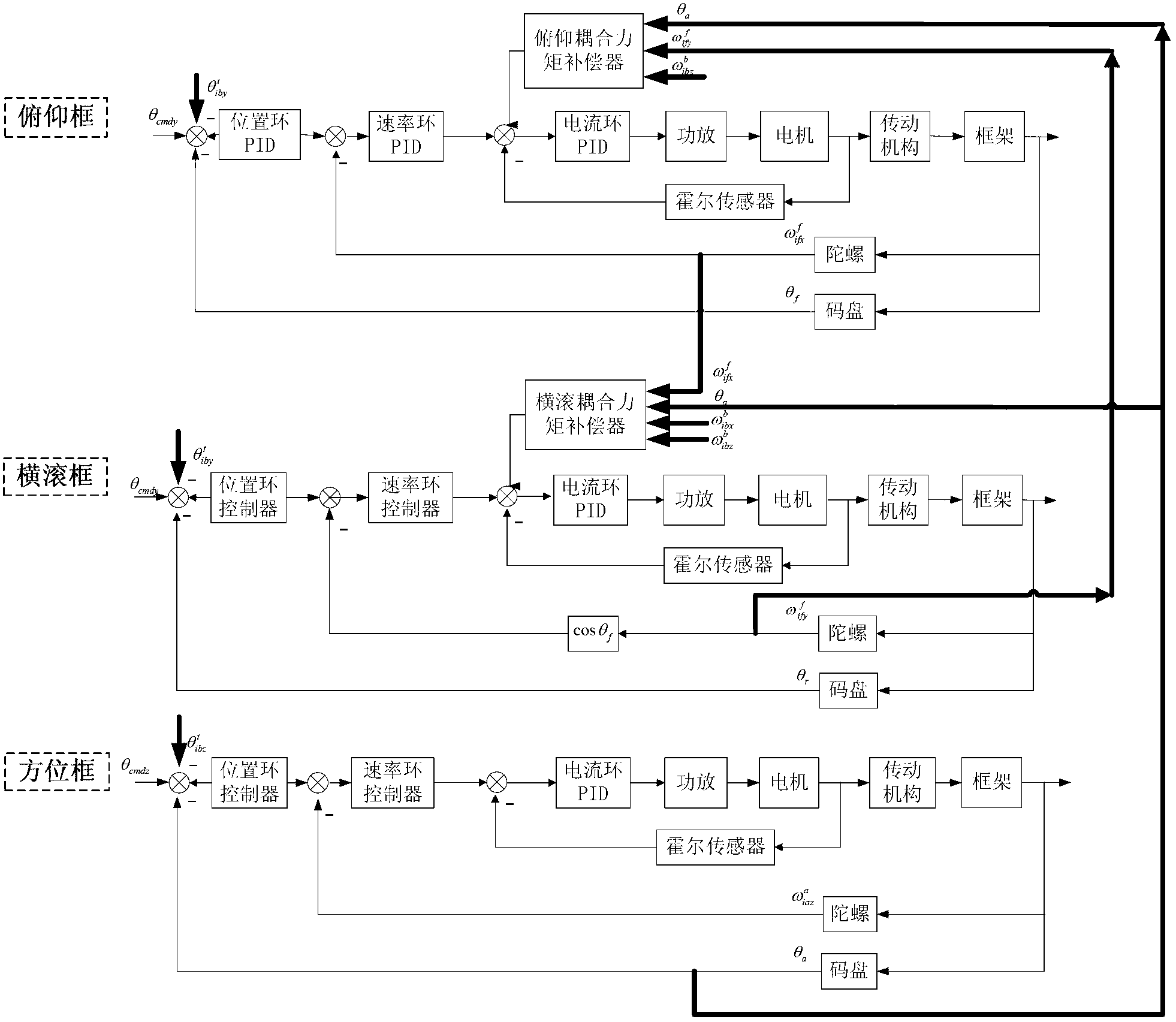
[0036] Such as figure 1 and image 3 Shown, the concrete implementation method of the present invention is as follows:
[0037] (1) The steps to establish a simplified dynamic model under the moving base are as follows:
[0038] (11) Based on the rigid body dynamics characteristics and space vector superposition principle, establish three-axis inertial stable platform coordinate system: base coordinate system, roll frame coordinate system, pitch frame coordinate system, azimuth frame coordinate system; Figure 4 Shown, where the base coordinate system Ox b the y b z b :x b 、y b ,z bPointing to the right, front and up of the flight carrier respectively; the roll frame coordinate system Ox r the y r z r : roll axis y r with y b Same direction, Ox r the y r z r Relative Ox b the y b z b tethered b shaft rotation, resulting in a roll angle θ r ; Pitch frame coordinate system Ox f the y f z f : Pitch axis x f with x r Same direction, Ox f the y f z f Rel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More