

Lunar rover coordinated drive self-adaption fault-tolerant control method based on hierarchical fuzzy system
A fault-tolerant control and fuzzy system technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of reducing real-time control, difficult engineering, dimension disaster, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0056] The specific implementation steps of the self-adaptive fault-tolerant control method for the coordinated drive of the lunar exploration vehicle based on the layered fuzzy system:
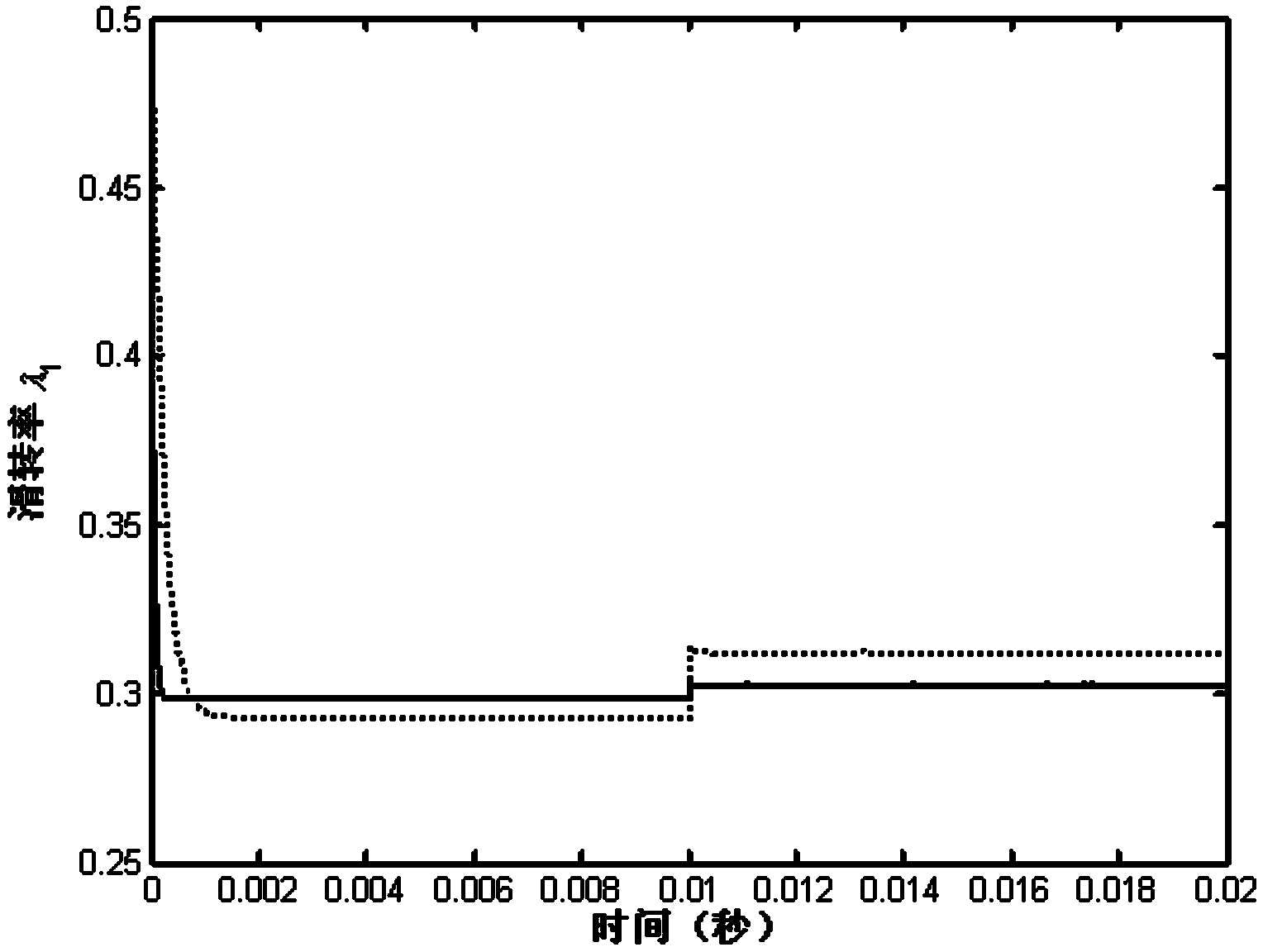
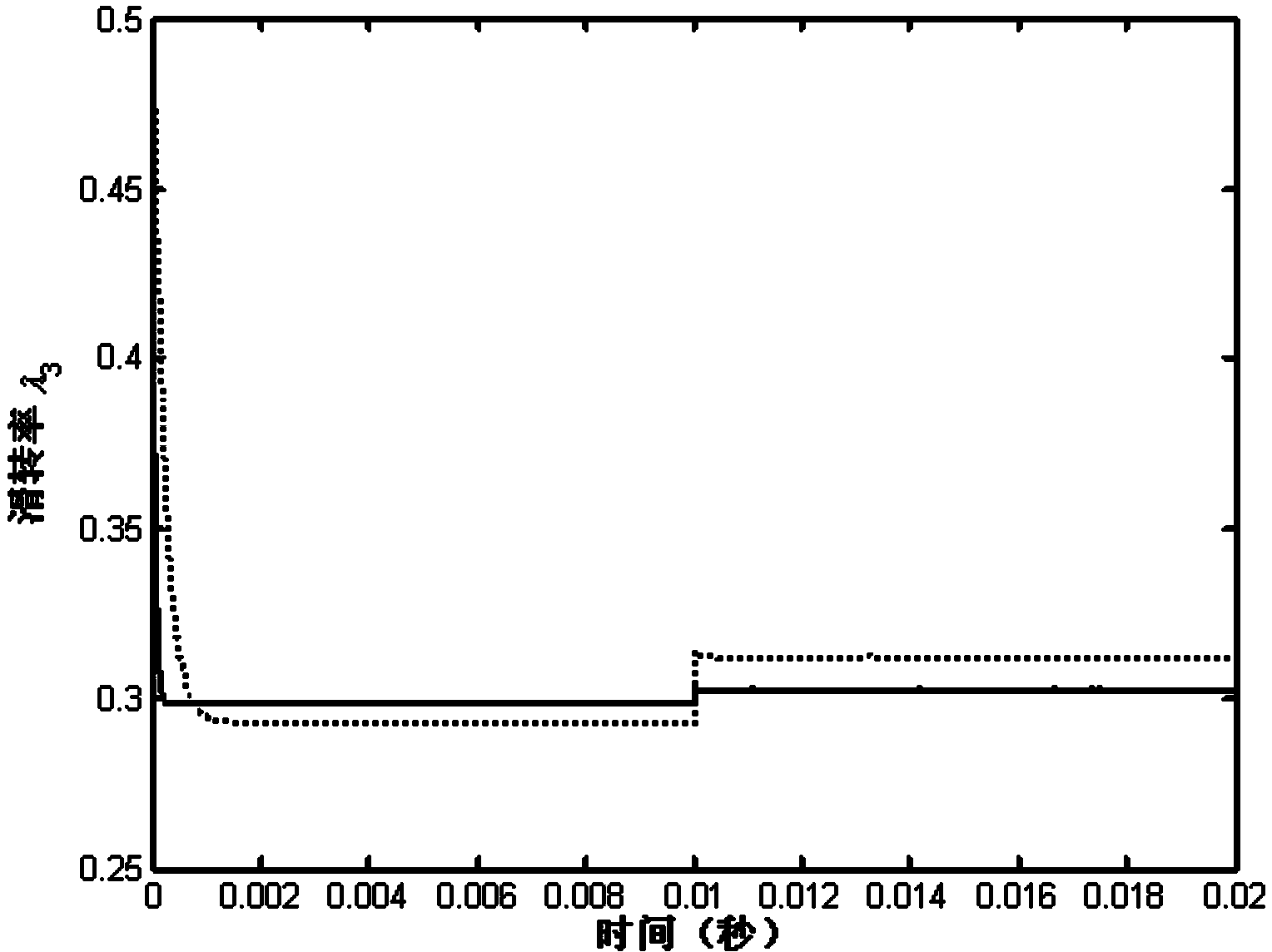
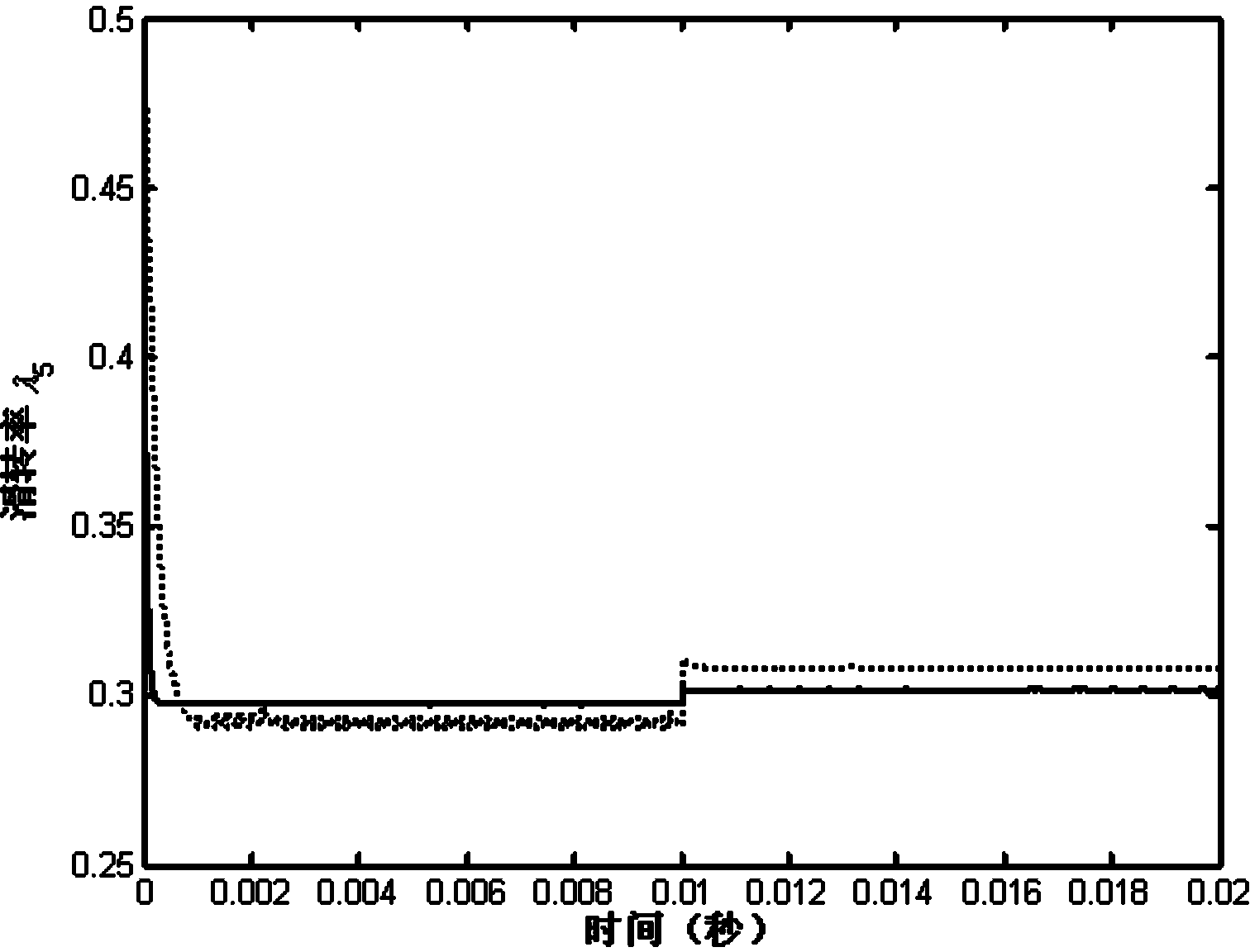
[0057] In the first step, the wheel slip rate is given expectations , due to the symmetry of the vehicle body structure, only half of the vehicle model needs to be considered, namely situation. In the example, take , the desired output .
[0058] In the second step, according to the given wheel slip rate The expected value of , bounded in the dynamic process range of change. In the example, The range of change takes .
[0059] In the third step, according to the variation range of known parameters and unknown parameters, the unknown function in the dynamic equation of the drive system of the lunar exploration vehicle when driving on soft soil is given Boundary function and the unknown control gain The upper bound function of and the lower bound function ;which is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More