

Multi-unmanned aerial vehicle target allocation decision making method in interval information condition
A target allocation, multi-UAV technology, applied in the field of UAV control and decision-making, which can solve problems such as uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In this embodiment, a multi-UAV target allocation decision method under the condition of interval information is applied by N U A drone attacking N T In a battlefield environment with ground targets, and there are N U =N T ; Specifically, follow the steps below:
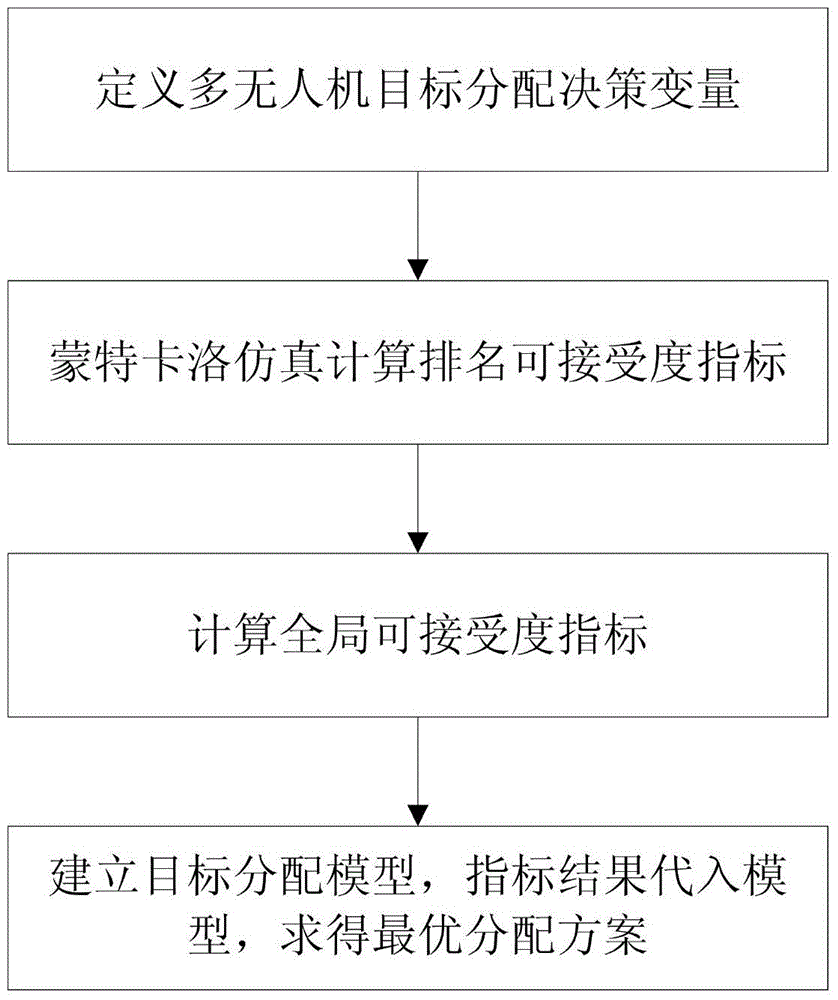
[0064] Step 1. Define variables for multi-UAV target allocation decision:
[0065] Will N U unmanned aerial vehicles 1≤i≤N U ;, u i means N U The i-th UAV among the UAVs u; the N T ground objects marked as 1≤j≤N T ;, t j means N T The jth ground target among ground targets t;
[0066] define x ij is a judgment value, x ij = 1 means the i-th UAV u i Attack the jth ground target t j , x ij =0 means the i-th UAV u i Do not attack the jth ground target t j ;
[0067] In the actual complex battlefield environment, it is difficult to obtain accurate target allocation information, which can be expressed as uncertain interval decision information in mathematics; the multi-UAV target allocation p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More