

A multi-UAV target allocation decision-making method under the condition of interval information
A target allocation, multi-UAV technology, applied in the field of UAV control and decision-making, which can solve problems such as uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
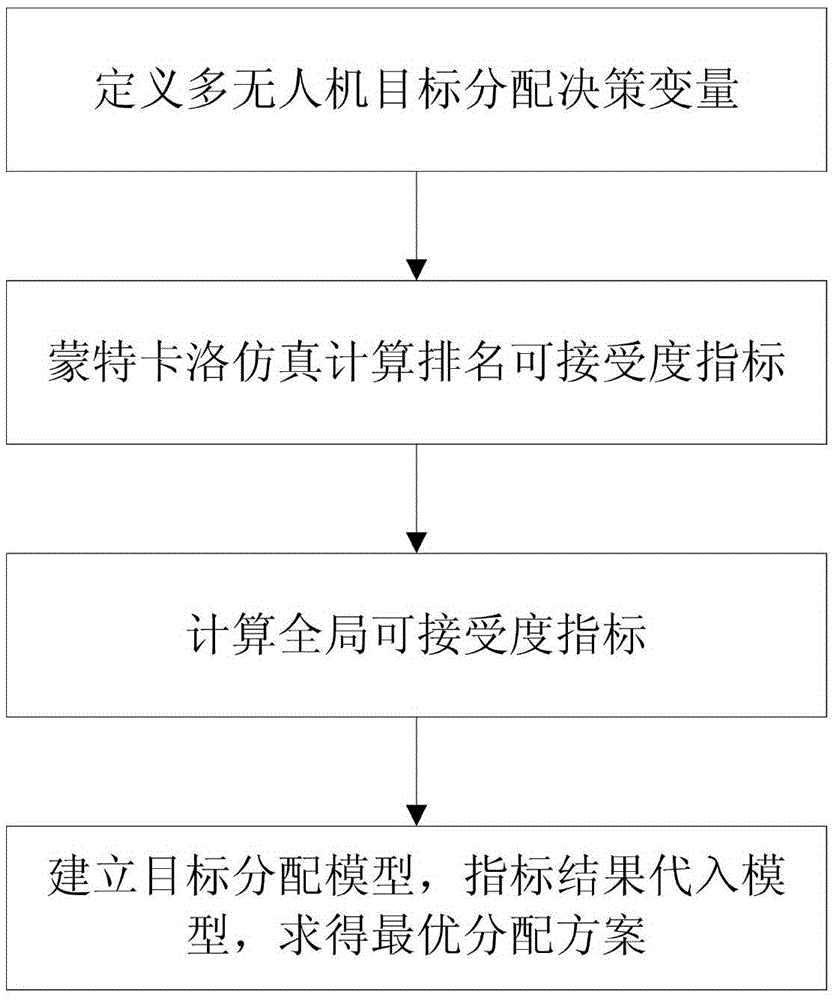
[0063] In this embodiment, a multi-UAV target allocation decision method under the condition of interval information is applied to N U UAV attacking N T Ground targets in the battlefield environment, and there are N U =N T ; Specifically, follow the steps below:
[0064] Step 1. Define the variables of the multi-UAV target allocation decision:
[0065] Will N U A drone is recorded as 1≤i≤N U ;, u i Means N U The i-th UAV among UAVs u; Put N T Ground targets are recorded as 1≤j≤N T ;, t j Means N T The jth ground target among ground targets t;
[0066] Define x ij Is a judgment value, x ij =1 means the i-th UAV u i Attack the jth ground target t j , X ij =0 means the i-th UAV u i Do not attack the jth ground target t j ;
[0067] In the actual complex battlefield environment, it is difficult to obtain accurate target allocation information, which can be expressed as uncertainty interval decision information in mathematics; the target allocation problem of multiple drones can be descri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More