

Penetrating forceps spine microsurgery manipulator
A manipulator and forceps technology, applied in the field of manipulators, can solve the problems of cumbersome installation and replacement of instruments, single function, no minimally invasive spine surgery, etc., and achieve the effect of safe and efficient use and small footprint.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
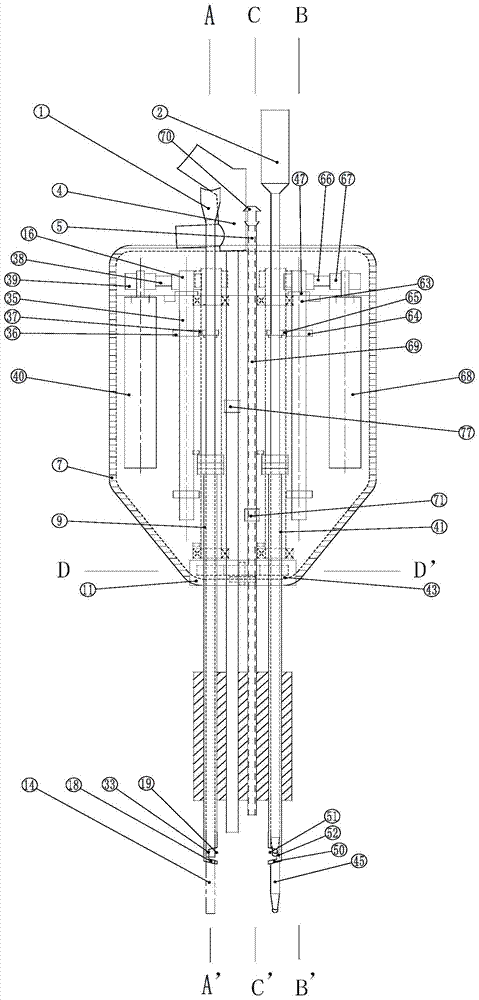
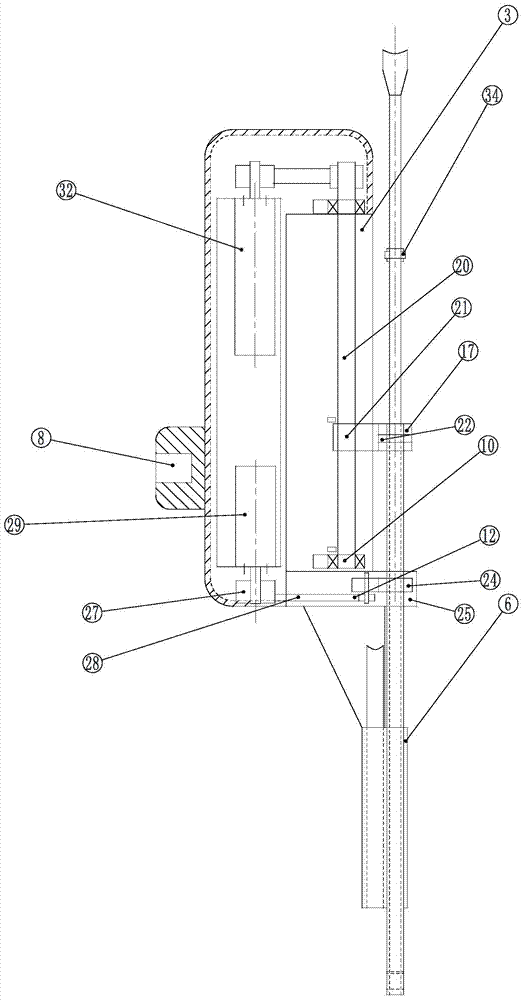
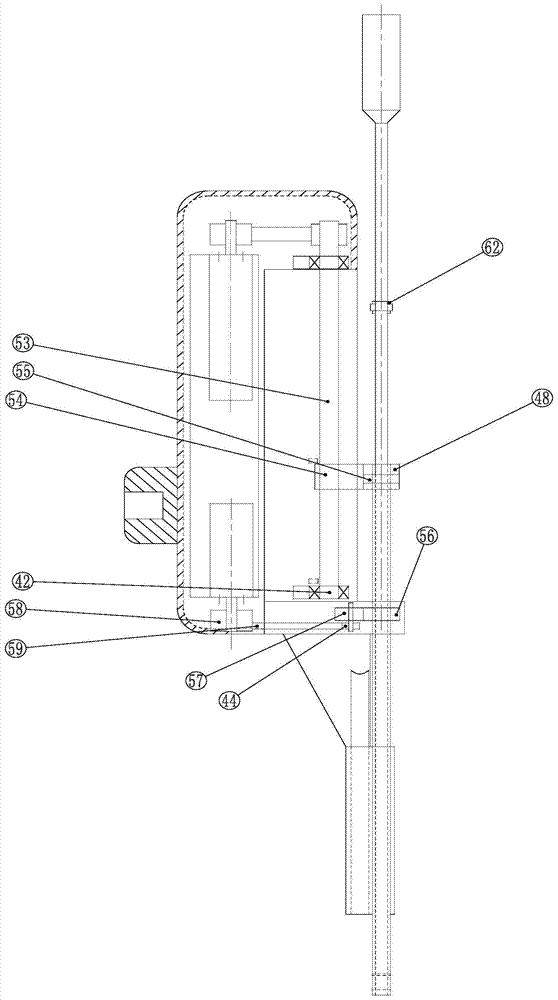
[0059] The penetrating pincer type spine micro-surgical manipulator includes an organic shell 7, a base plate 3 is arranged on the shell 7, and a working channel 6 is set under the shell 7. The special feature is that: the base plate 3 is set There are a plurality of through holes, and a penetrating forceps type soft tissue processing mechanism 1, a penetrating forceps type bone tissue processing mechanism 2, an endoscope 4, and a nerve retraction and suction mechanism 5 are arranged in the through holes. In this way, relying on the existence of the through holes, effective positioning guidance for the above-mentioned mechanisms can be realized. At the same time, in order to facilitate a stable connection with the subsequent robot body, a connecting mechanism 8 with a guide cylinder structure is provided on the casing 7 to avoid the phenomenon of parts being stuck.
[0060] In order to facilitate manufacturing and implementation, the following specific elaborations are made in...
Embodiment 2
[0070] The penetrating pincer type spine micro-surgical manipulator includes an organic shell 7, a base plate 3 is arranged on the shell 7, and a working channel 6 is set under the shell 7. The special feature is that: the base plate 3 is set There are a plurality of through holes, and a penetrating forceps type soft tissue processing mechanism 1, a penetrating forceps type bone tissue processing mechanism 2, an endoscope 4, and a nerve retraction and suction mechanism 5 are arranged in the through holes. In this way, relying on the existence of the through holes, effective positioning guidance for the above-mentioned mechanisms can be realized. At the same time, in order to facilitate a stable connection with the subsequent robot body, the casing 7 is provided with a connecting mechanism 8 with a guide cylinder structure to avoid the phenomenon of parts being stuck.
[0071] In order to facilitate manufacturing and implementation, the following specific elaborations are made ...
Embodiment 3
[0080] The penetrating pincer type spine micro-surgical manipulator includes an organic shell 7, a base plate 3 is arranged on the shell 7, and a working channel 6 is set under the shell 7. The special feature is that: the base plate 3 is set There are a plurality of through holes, and a penetrating forceps type soft tissue processing mechanism 1, a penetrating forceps type bone tissue processing mechanism 2, an endoscope 4, and a nerve retraction and suction mechanism 5 are arranged in the through holes. In this way, relying on the existence of the through holes, effective positioning guidance for the above-mentioned mechanisms can be realized. At the same time, in order to facilitate a stable connection with the subsequent robot body, the casing 7 is provided with a connecting mechanism 8 with a guide cylinder structure to avoid the phenomenon of parts being stuck.
[0081] In order to facilitate manufacturing and implementation, the following specific elaborations are made ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More