

Single-joint fault mechanical arm model rebuilding method based on projection geometric method
A technology of faulty machinery and projected geometry, which is applied to manipulators, program-controlled manipulators, and manufacturing tools, etc., and can solve problems such as inability to perform motion control and changing the motion model of the manipulator.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
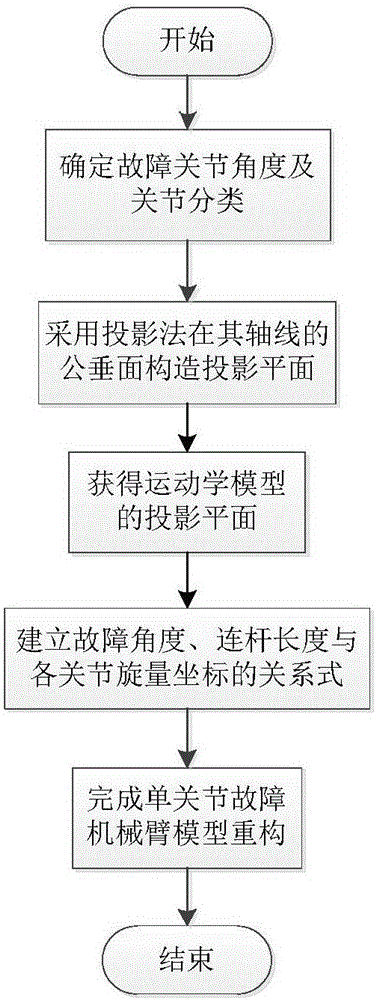
[0050] 1. The projection method is used to perform two-dimensional projection on the kinematics model of the single-joint failure manipulator
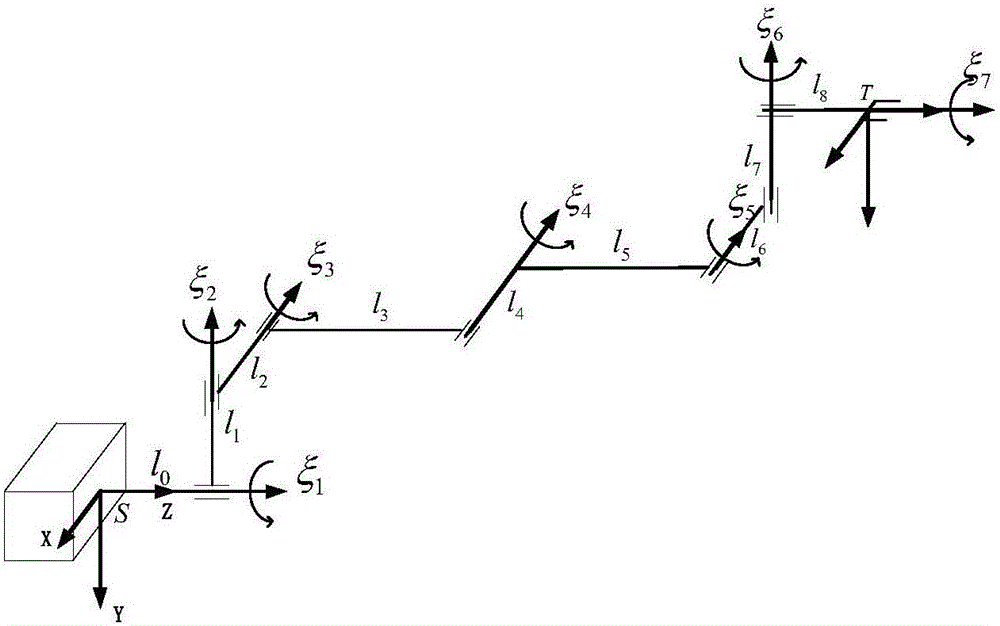
[0051] Such as figure 1 Shown is the flow chart of the method of the present invention. The present invention takes the mechanical arm with seven degrees of freedom in space as the research object, the length of each bar is shown in Table 1, and the configuration of the mechanical arm is as follows figure 2 shown. For each joint J i (i=1,...,7), construct its motion screw, and the coordinates of the screw are shown in Table 2.
[0052] Table 1 Length of connecting rod
[0053]
[0054] Table 2 Spinor coordinates under normal state
[0055]
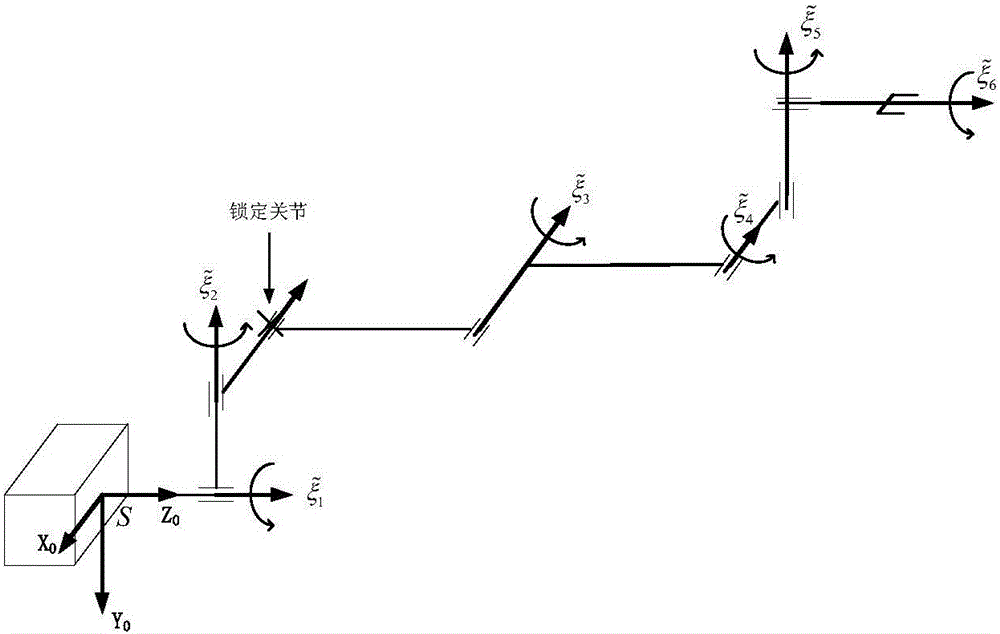
[0056] X-axis joint J 3 When locked at 30°, J 3 The subsequent joints are labeled as The reconstructed spinor system is as image 3 As shown, the YZ direction projection diagram is as follows Figure 4 shown. Y-axis joint J 2 When locked at 30°, J 2 The subsequent joints are labe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More