

Seven-freedom-degree upper limb rehabilitation robot based on combination drive
A rehabilitation robot and hybrid drive technology, applied in the field of medical rehabilitation, can solve the problems of large rotational inertia, inconvenient adjustment, and inability to support joint rehabilitation movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
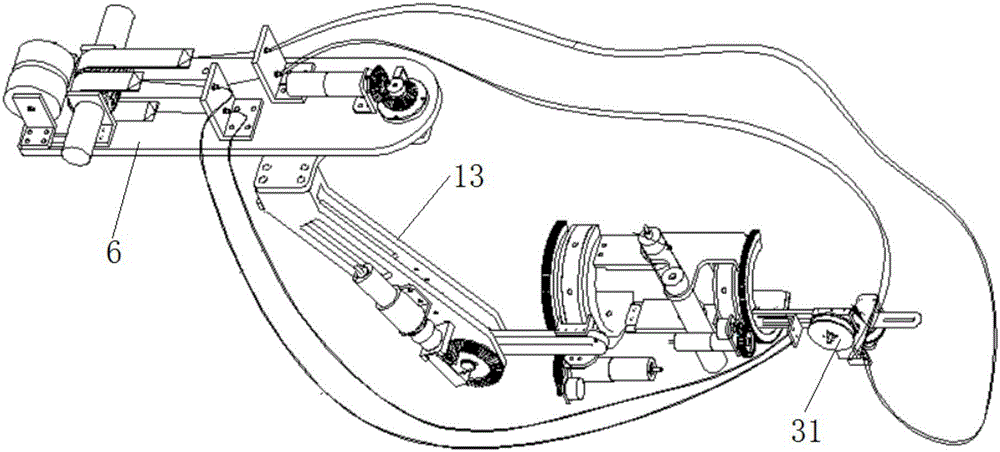
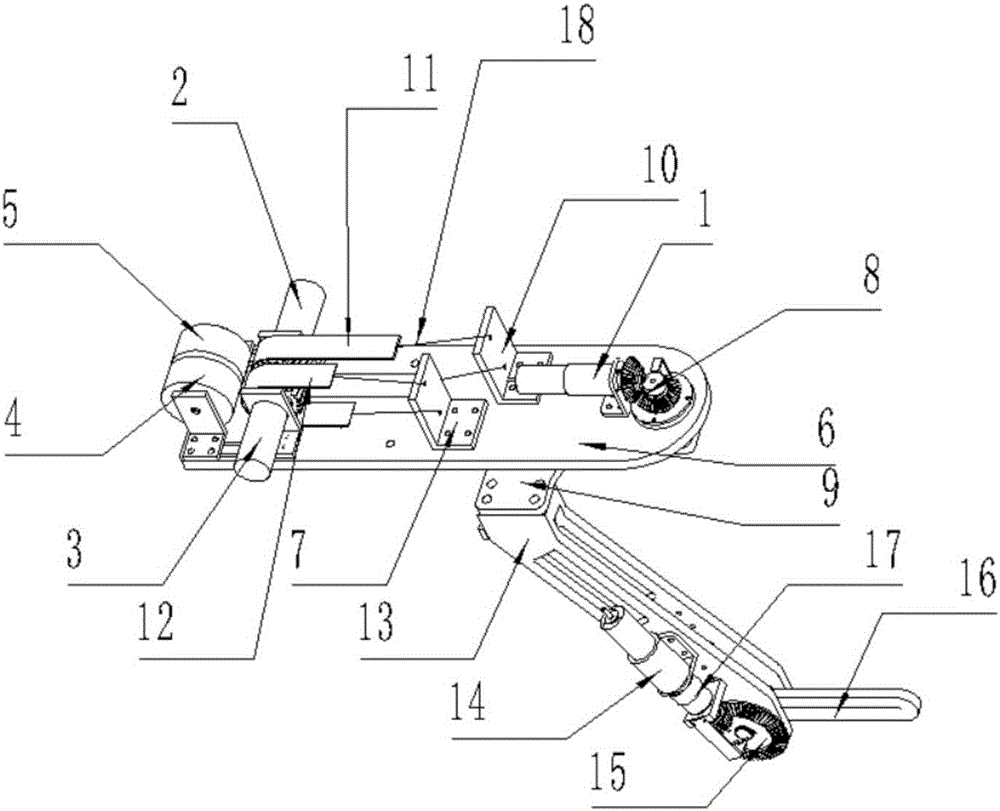
[0028] The seven-degree-of-freedom upper limb rehabilitation robot based on hybrid drive involved in the present invention consists of a shoulder joint rotation / extension movement module part; shoulder joint extension and flexion, adduction / abduction and elbow joint flexion and extension, pronation / supination module part; Wrist joint radial flexion / ulnar flexion, dorsiflexion / palm flexion movement module part.
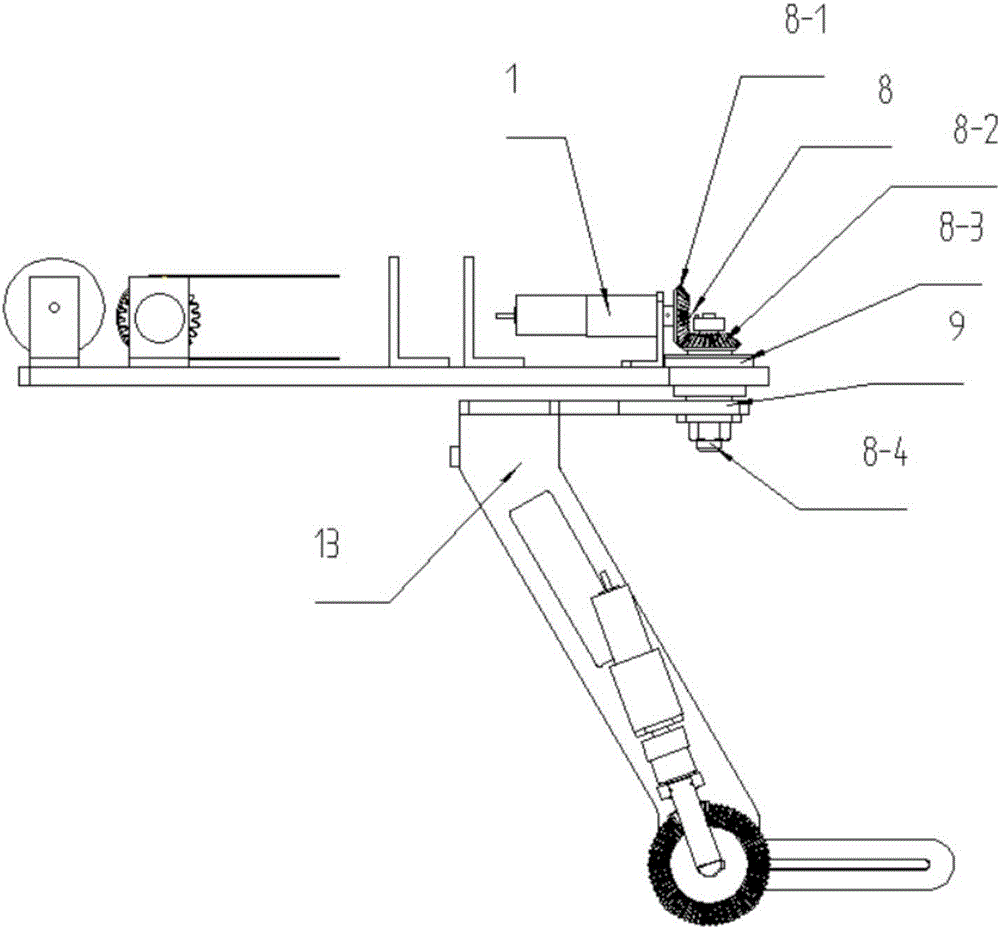
[0029] Shoulder joint internal rotation / external rotation movement module part: the shoulder cantilever horizontal plate 6 is the base plate of the whole machine, the shoulder joint rotating motor 1 provides a rotating pair, and the gear train structure 8 is connected with the shaft through the internal bearing, so that the rotating pair transmits After reaching the rotating arm 9, the side arm 13 is installed on the rotating arm 9, and the rotation of the rotating arm drives the side arm to rotate around the Z axis, so that the internal rotation and external rotation o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More