

Detection method and device for heading angle of mobile robot and computer readable storage medium
A mobile robot and detection method technology, applied in the field of robotics, can solve problems such as the failure of magnetic sensor detection methods, and achieve the effects of wide coverage area, stable performance, and low privacy intrusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
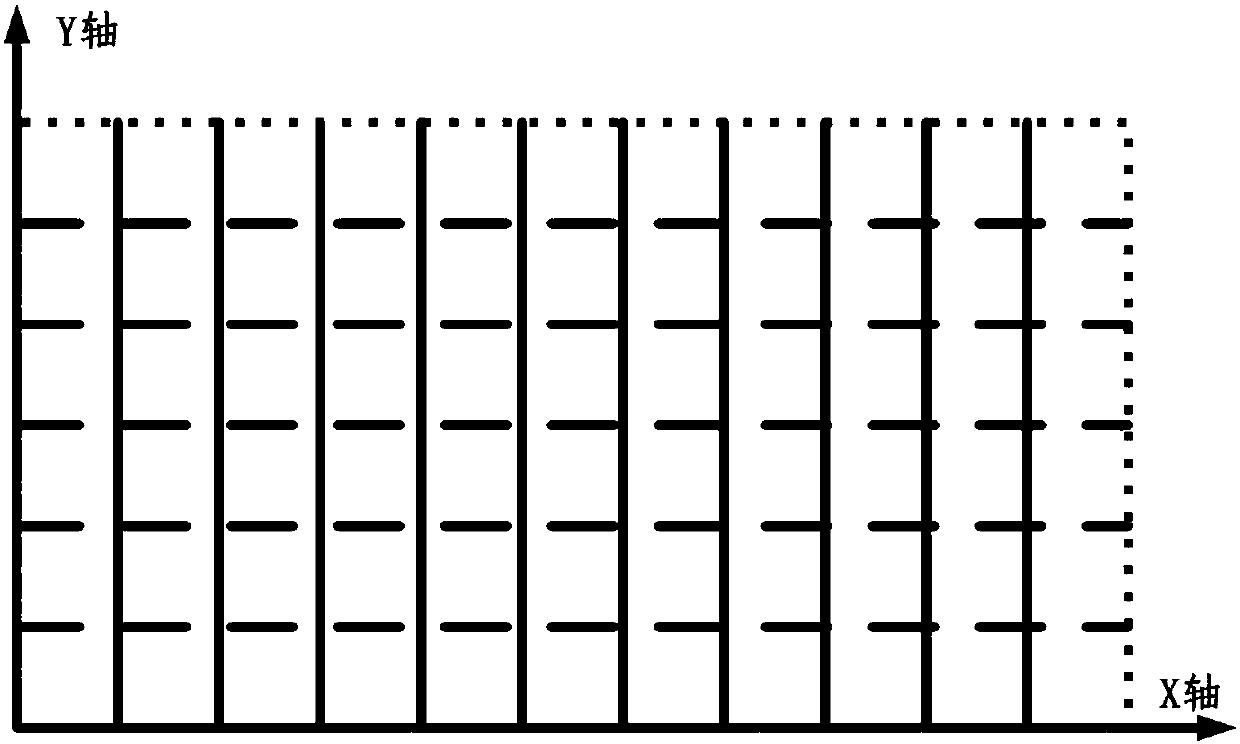
[0021] Before the implementation of the present invention, it is necessary to configure auxiliary lines on the ground of the robot work area, as follows:
[0022] On the ground of the working area of the robot, there are N A Each parallel line group contains several parallel lines with the same color at different intervals; the line width is appropriately set according to the environment; the counterclockwise rotation angle of the parallel line group relative to the zero-degree reference line is called the parallel line The angle of the auxiliary line of the line group, the zero-degree reference line can be selected arbitrarily, and generally the geographical eastward coordinate axis can be selected as the zero-degree reference line; the angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More