

Pneumatic joint-type rehabilitation manipulator
A manipulator and articulated technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as long rehabilitation training time, difficult recovery effect, and long-distance family journeys. It is convenient to manufacture, beneficial to patient rehabilitation, The effect of simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Obviously, the described embodiments are part of the present invention Examples, not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0034] In conjunction with accompanying drawing, the present invention will be further described:
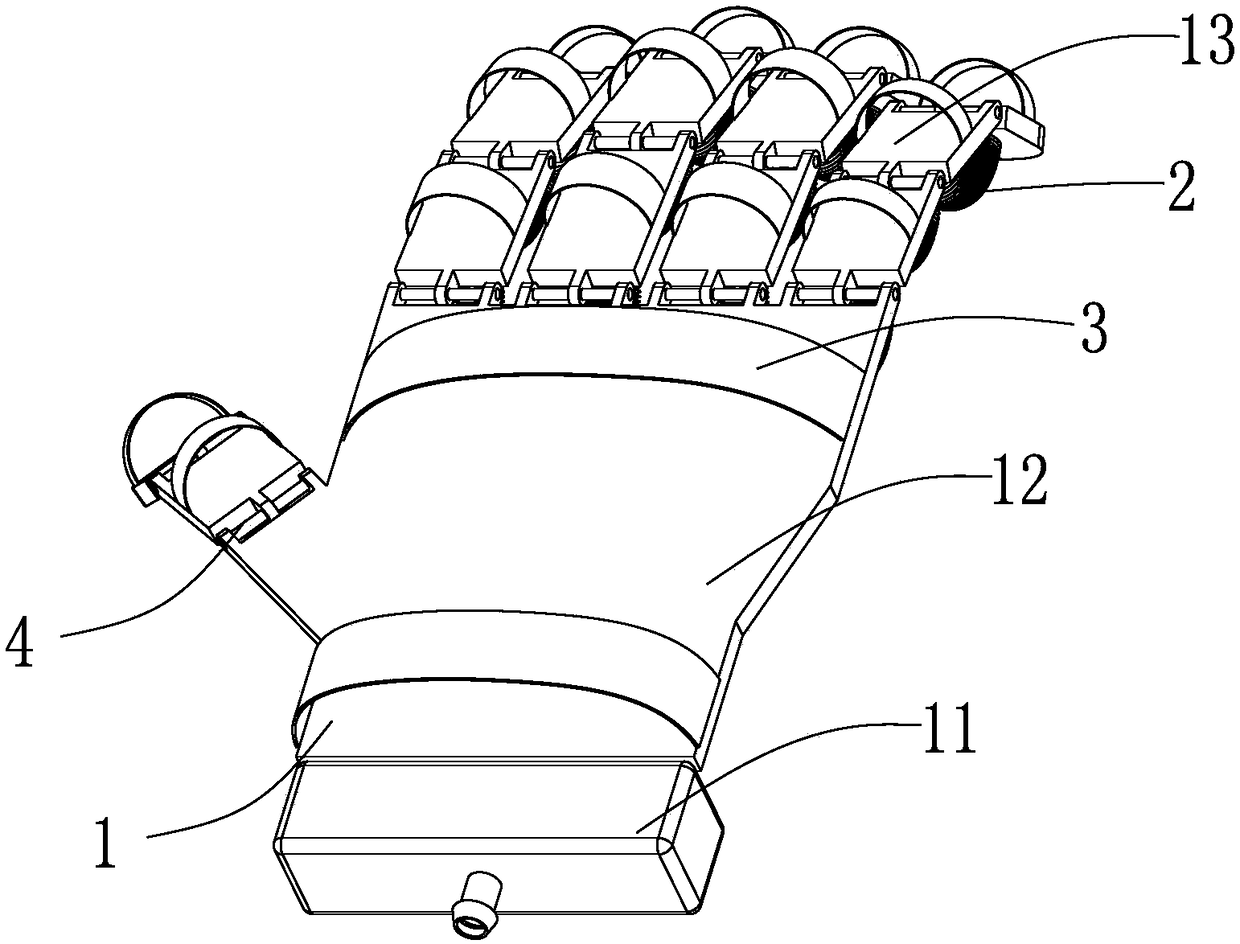
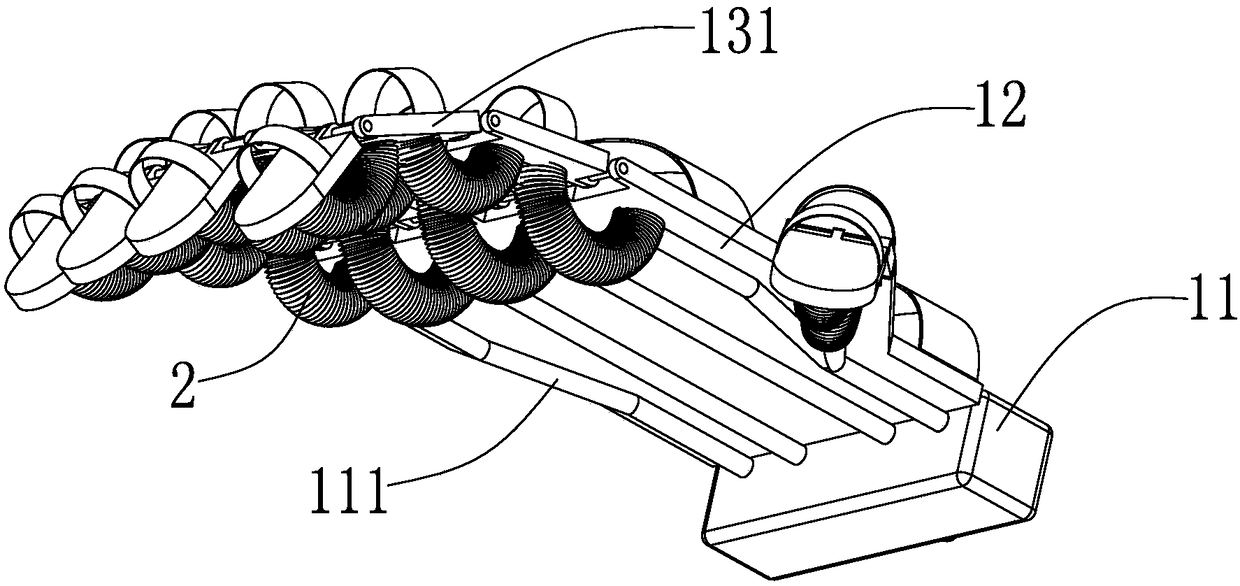
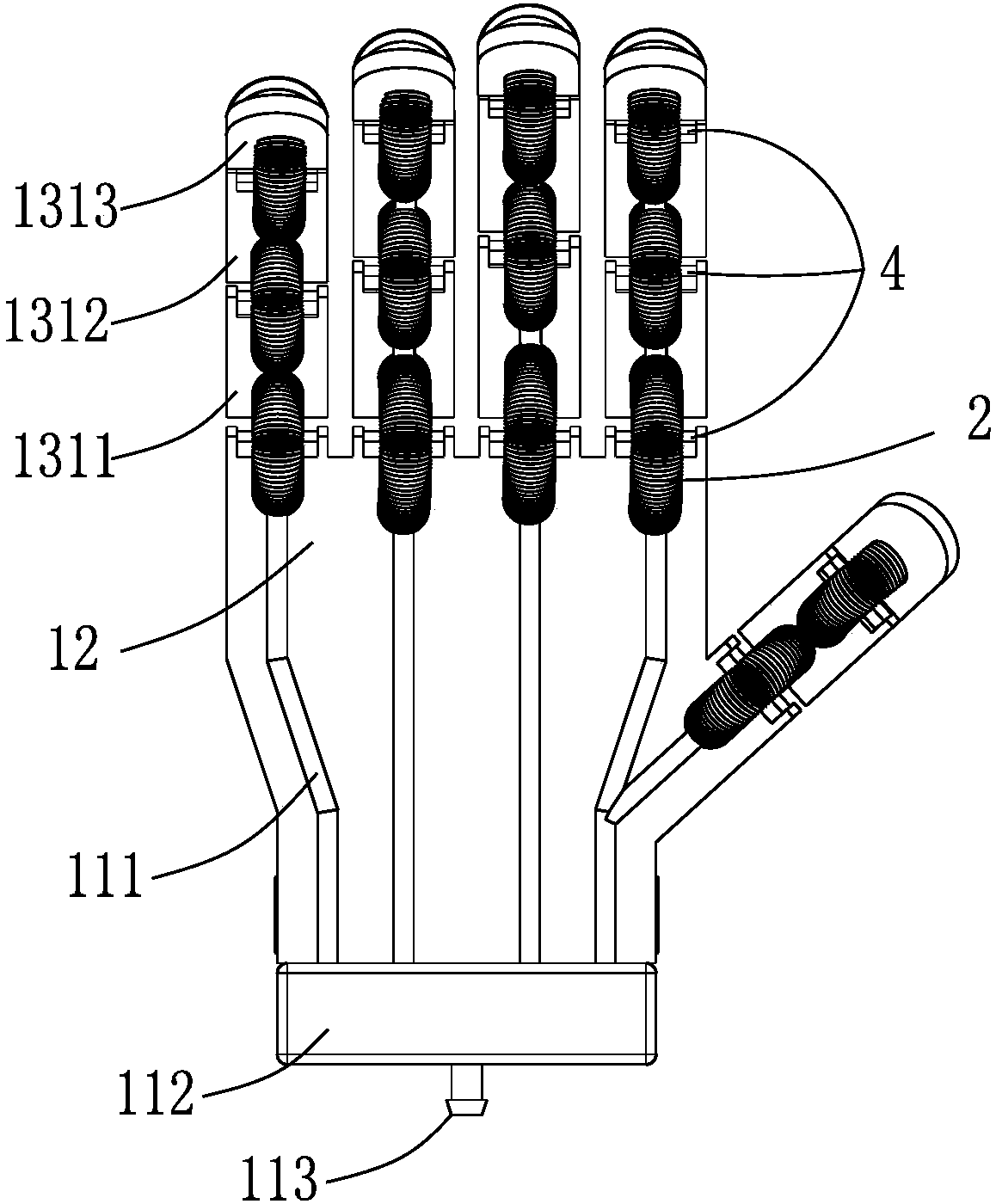
[0035] combined with figure 1 , figure 2 and Figure 4 , in one embodiment, a pneumatically articulated rehabilitation manipulator, including an exoskeleton manipulator 1 and a pneumatic joint; the exoskeleton manipulator 1 includes a wrist inflation and deflation part 11, a pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More