

Inter-axle torque global active allocation in-time four-drive system
A technology of active distribution and torque, applied in the direction of control devices, vehicle parts, transportation and packaging, etc., can solve problems such as inability to distribute torque, vehicle instability, and vehicle entrapment, so as to achieve good driving economy and ensure the safety of the entire vehicle Dynamic, responsive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
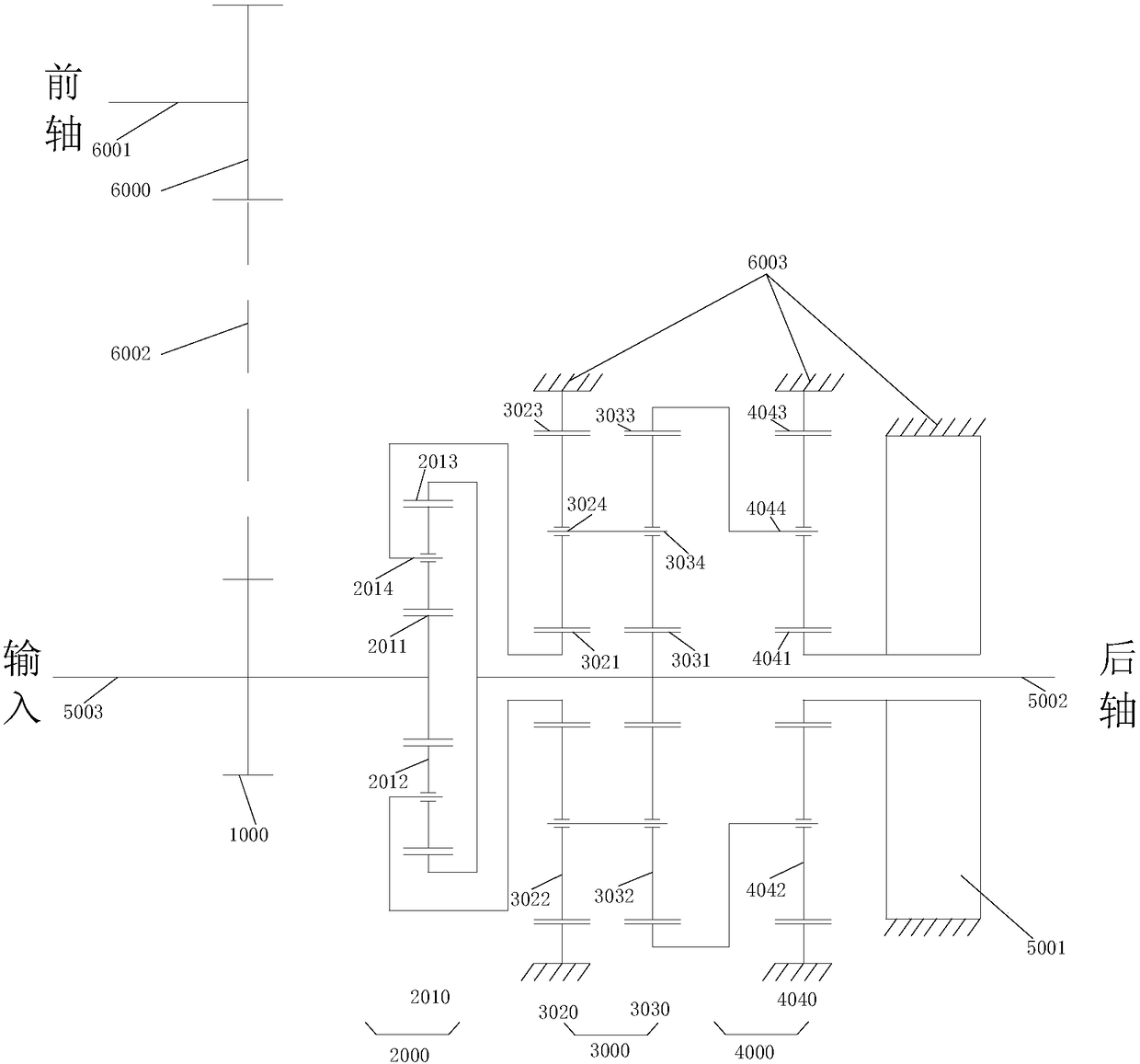
[0080] Such as figure 1 As shown, the present invention provides a timely four-wheel drive system with global active distribution of inter-axle torque, which is mainly composed of a central differential 2000, a double planetary row TV coupling mechanism 3000, a TV control motor reduction mechanism 4000 and a TV control motor 5001 .
[0081] The central differential 2000 is located near the power input end and is mainly composed of a first planetary gear train 2010 , including a sun gear 2011 , three planetary gears 2012 evenly distributed along the circumferential direction, an inner ring gear 2013 and a planetary carrier 2014 . Wherein, the center of the ring gear 2013 and the rear axle 5002 are fixedly connected together by splines. The planetary carrier 2014 is a detachable planetary carrier, which can be disassembled into several parts. During assembly, each part can be carried out separately, and then the parts are assembled and fixed together, so that the inner ring gea...
Embodiment 2
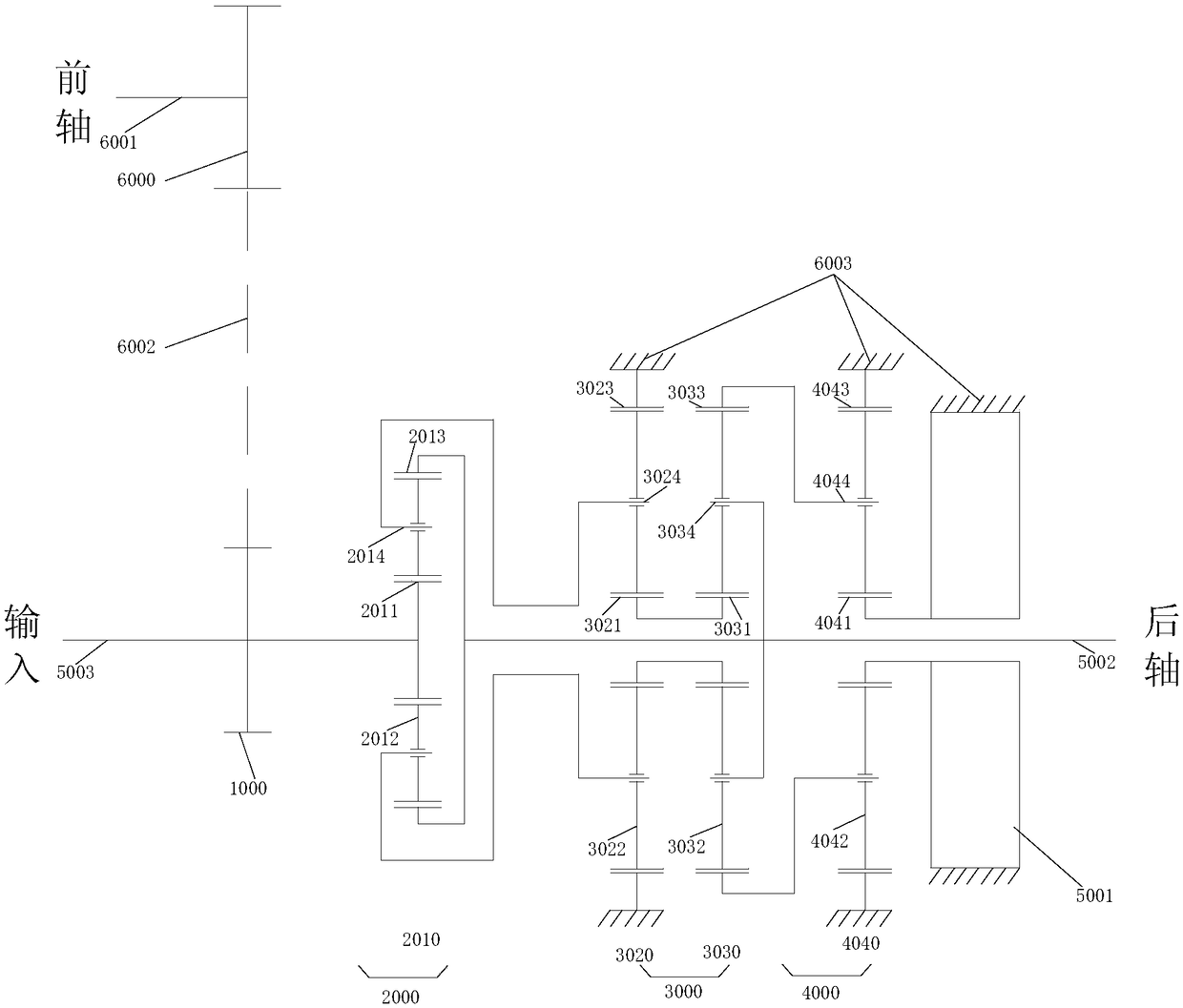
[0089] Such as figure 2 As shown, in this embodiment, a common sun gear type double planetary row TV coupling mechanism 3000 is adopted, that is, the sun gear 3021 of the second planetary gear system 3020 is fixedly connected with the sun gear 3031 of the third planetary gear system 3030, and the sun gear Between the sun gear 3021 and the sun gear 3031 is a hollow hollow shaft, the rear shaft 5002 passes through the hollow shaft from front to back, and a pair of bearings are arranged between the two to reduce the friction and mutual supporting role. The center of the planet carrier 3024 of the second planetary gear train 3020 is fixedly connected with the end of the hollow shaft extending backward from the planet carrier 2014 of the first planet gear train 2010 through splines. The planet carrier 3034 of the third planetary gear train 3030 and the rear axle 5002 extending from the center thereof to the rear are connected together by splines. Structural diagram such as fig...
Embodiment 3
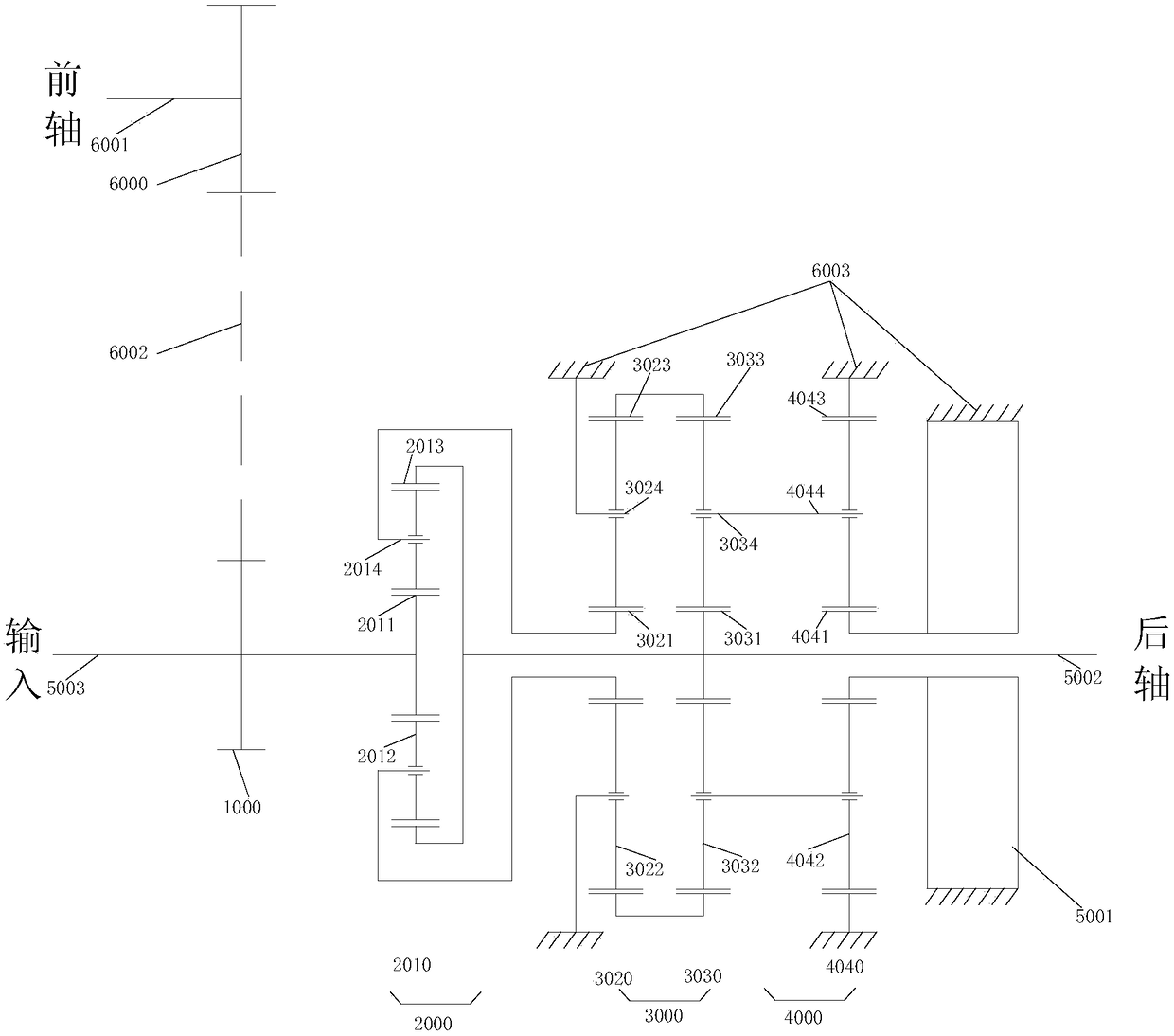
[0091] Such as image 3 As shown, in this embodiment, a common internal ring gear type double planetary row TV coupling mechanism 3000 is adopted, that is, the internal ring gear 3023 of the second planetary gear train 3020 is fixedly connected with the internal gear ring 3033 of the third planetary gear train 3030 , the ring gear 3023 and the ring gear 3033 can be supported by a pair of bearings arranged in the four-wheel drive system housing 6003 . The planet carrier 3024 of the second planetary gear train 3020 is fixedly connected with the housing 6003 of the four-wheel drive system. The planetary carrier 4044 of the fourth planetary gear train 4040 is fixedly connected with the planetary carrier 3034 of the third planetary gear train 3030 . Structural diagram such as image 3 shown.
[0092] The timely four-wheel drive system with global active distribution of inter-axle torque mainly involves four working conditions: the TV control motor 5001 is not activated when driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More