

Navigation method and device
A navigation method and location information technology, applied in the field of navigation, can solve the problems of low navigation efficiency and inability to navigate in three-dimensional space, and achieve the effect of navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0030] According to an embodiment of the present invention, an embodiment of a navigation method is provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and, although in The flowcharts show a logical order, but in some cases the steps shown or described may be performed in an order different from that shown or described herein.
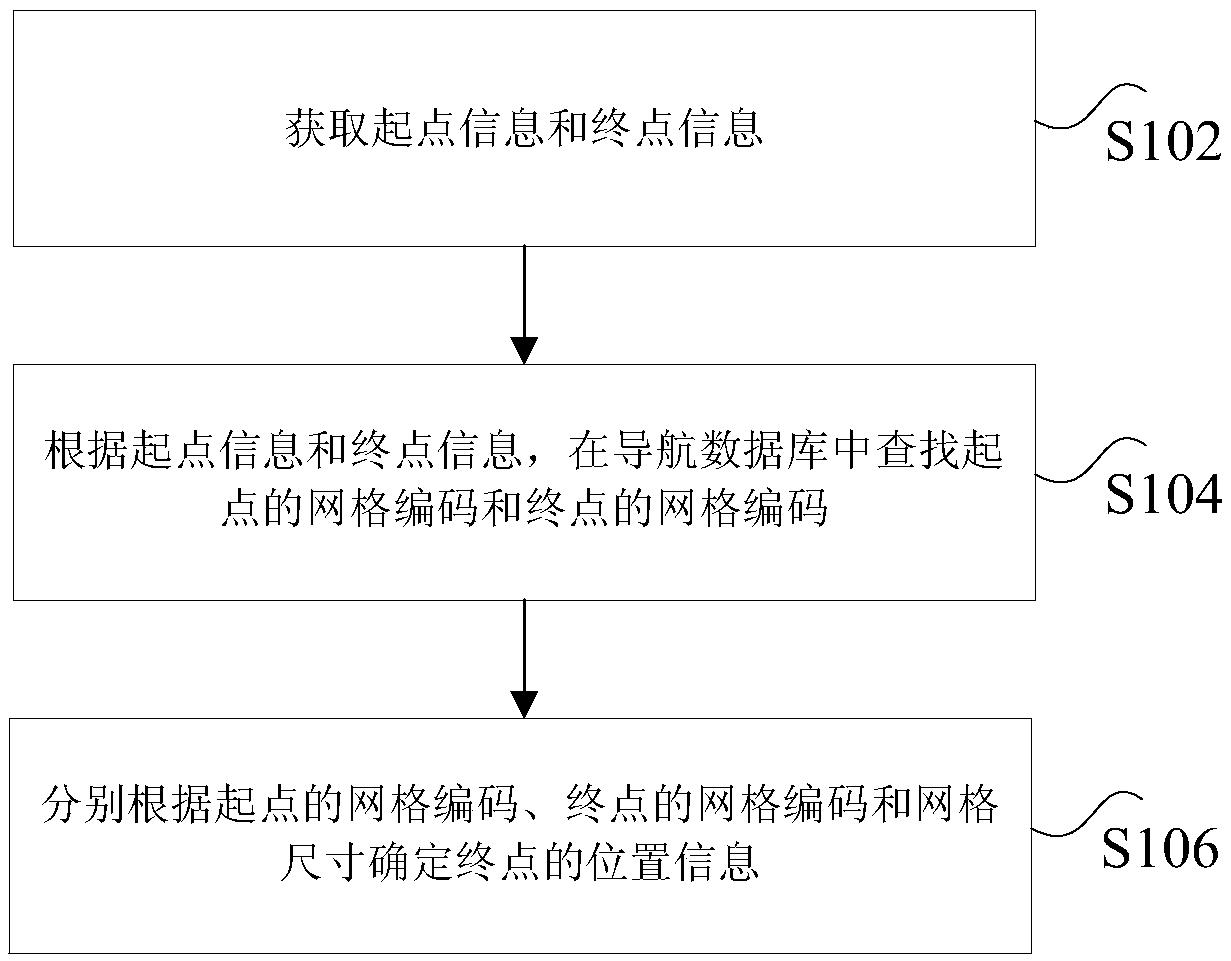
[0031] figure 1 is a flowchart of a navigation method according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0032] Step S102, acquiring start point information and end point information. Specifically, the above start point information may be the name of the start point, and the end point information may be the name of the end point.
[0033] Step S104, according to the starting point information and the ending point information, look up the grid code of...
Embodiment 2
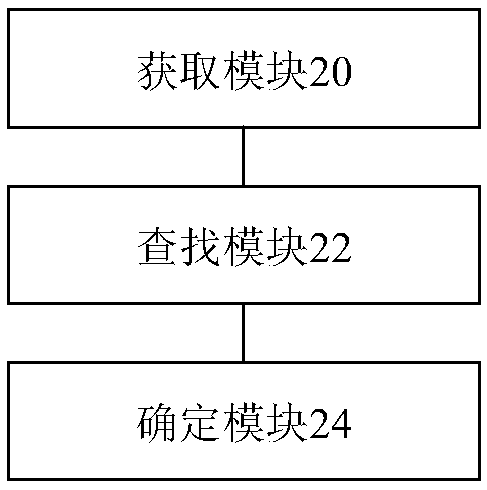
[0066] According to an embodiment of the present invention, an embodiment of a navigation device is provided, figure 2 is a schematic diagram of a navigation device according to an embodiment of the present invention, such as figure 2 As shown, the device includes:
[0067] The acquisition module 20 is configured to acquire starting point information and end point information.
[0068] The searching module 22 is configured to search the grid code of the starting point and the grid code of the ending point in the navigation database according to the starting point information and the ending point information, wherein the navigation database includes multi-point coding information and grid size.
[0069] The determination module 24 is used to determine the position information of the end point according to the grid code of the starting point, the grid code of the end point and the grid size respectively, wherein the position information of the end point includes at least: the...
Embodiment 3
[0080] According to an embodiment of the present invention, a storage medium is provided, and the storage medium includes a stored program, wherein when the program is running, the device where the storage medium is located is controlled to execute the navigation method in any one of implementation 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More