

An Optimal Path Planning Method for Automatic Vacuum Cleaning Robot Based on Path Density Analysis
An optimal path planning and automatic vacuuming technology, applied in vehicle position/route/height control, instruments, motor vehicles, etc., can solve problems such as low cleaning efficiency, achieve flexible working methods, easy implementation, and improve cleaning coverage Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention is further illustrated in conjunction with the drawings:
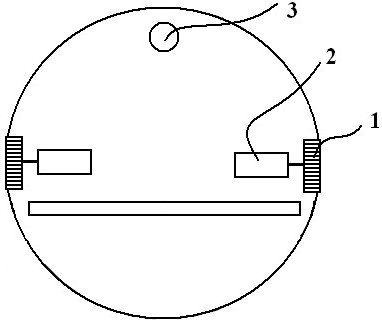
[0027] Refer Figure 1-2 , An automatic vacuum cleaning robot optimal path planning method based on path density analysis, the automatic vacuuming robot includes two drive wheels 1, two drive motors 2 connected to the drive wheel 1, the drive The encoder is mounted on the motor 2, further comprising a support wheel 3, the support wheel 3 functions, not for driving. The drive motor 2 and the encoder are connected to the controller. The controller implements free movement of the automatic vacuum robot by providing the speed and direction of the two of the drive wheels 1, and can calculate the automatic vacuum cleaning robot based on the signal of the encoder. The relative moving distance and the direction of rotation are in the original position of the coordinate (X, Y). Due to mechanical gaps, calculation errors, coordinates (x, y) will have accumulated errors, that is, over time, error will be l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More