

Flexible electronic skin with tactile and proximity dual-mode sensing function
An electronic skin and sensing function technology, applied in the field of robot collaborative sensing, can solve the problems of difficult integration of multiple functions, high sensor stiffness, and difficulty in bending, and achieves the effect of simple structure, reduced signal leads, and reduced load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below with reference to the drawings and embodiments.
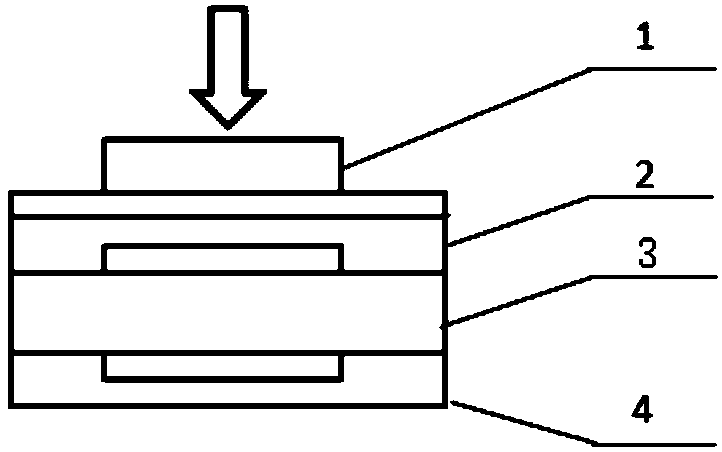
[0025] The present invention provides a flexible electronic skin with dual-mode sensing functions of tactile and proximity. The flexible electronic skin has a four-layer film structure, and from top to bottom, there are convex layer 1, upper plate layer 2, and intermediate medium layer. 3 and the lower plate layer 4 constitute a sensing unit. Such as figure 1 As shown, it is a single sensor unit. In this embodiment, the flexible electronic skin includes an 8×8 distributed sensor unit array.
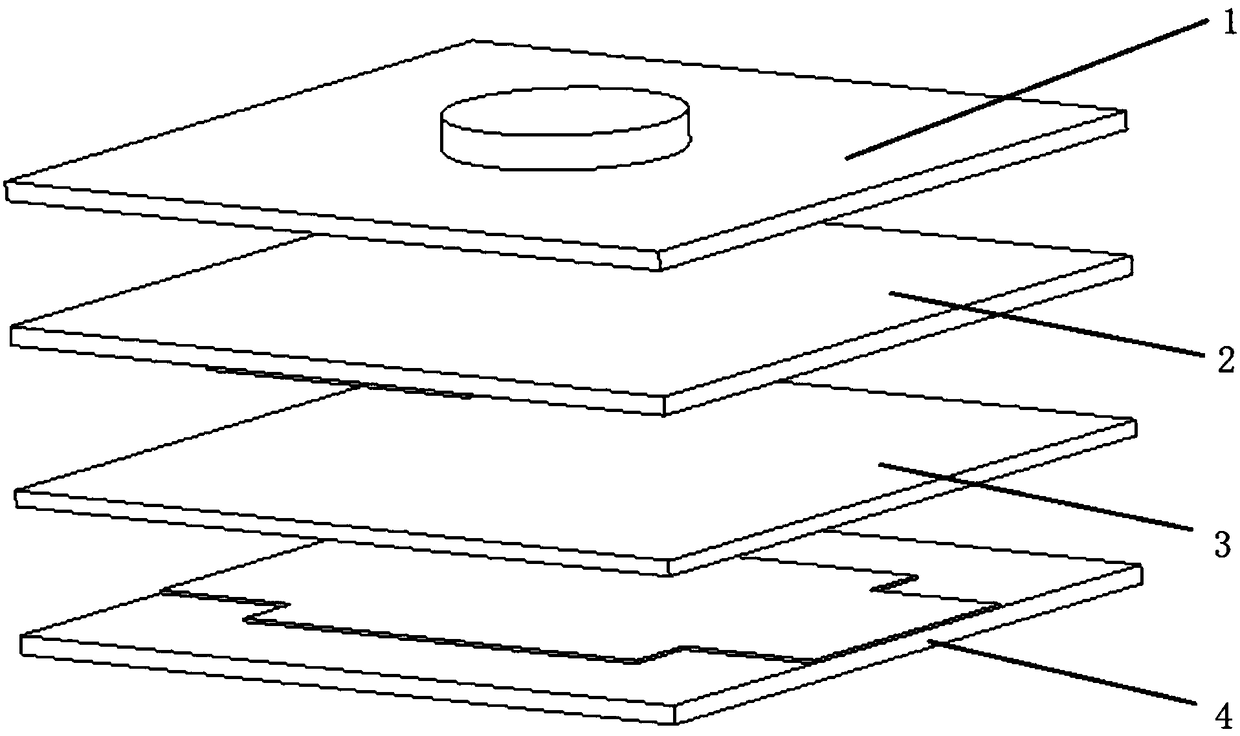
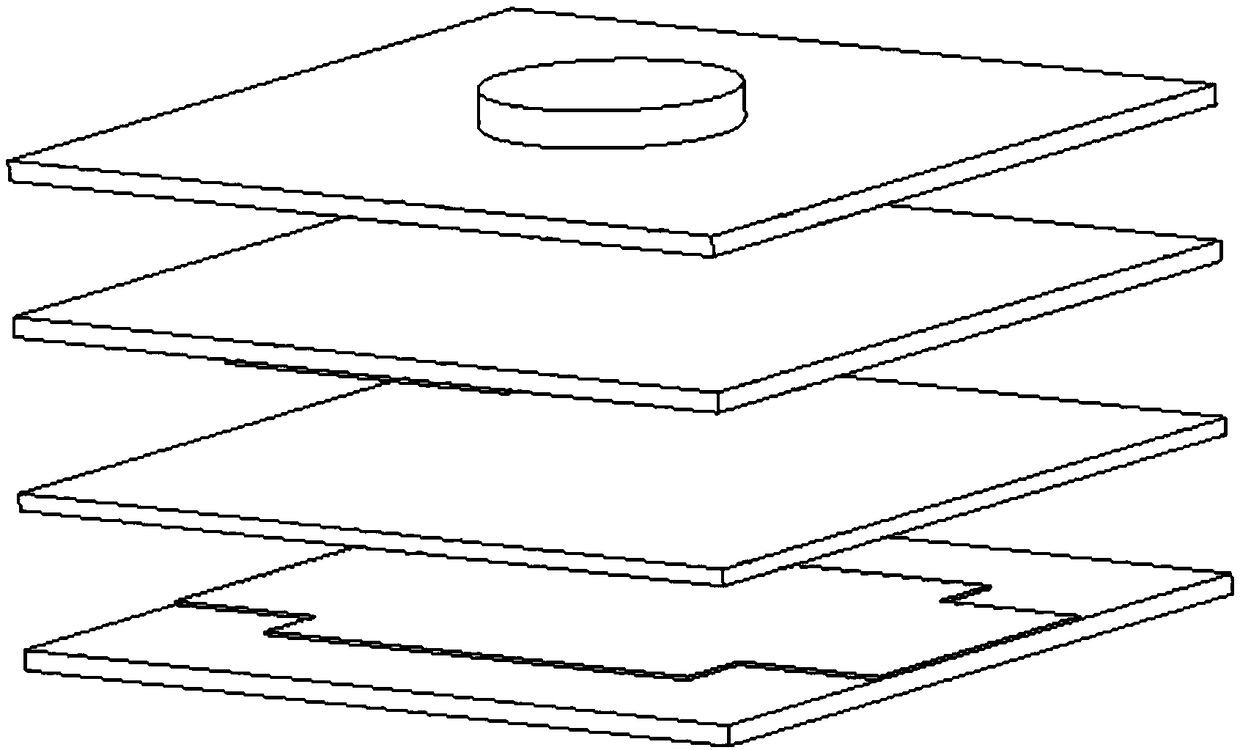
[0026] Such as figure 2 , image 3 As shown, the upper plate layer 2 is composed of a metal film embedded on the lower surface of a flexible base material. The metal film is copper Cu, and the flexible base material is polyimide PI. The metal film has a cross shape, including long sides and short sides. The length of the long side is equal to the side length of a single sensing un...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More