

A Composite Hierarchical Anti-jamming Control Method for Variant UAVs
A technology of composite layering and control methods, applied in the direction of non-electric variable control, attitude control, control/regulation system, etc., can solve the complex dynamic model of the variant UAV and the difficulty of the nonlinear control system of the variant UAV, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
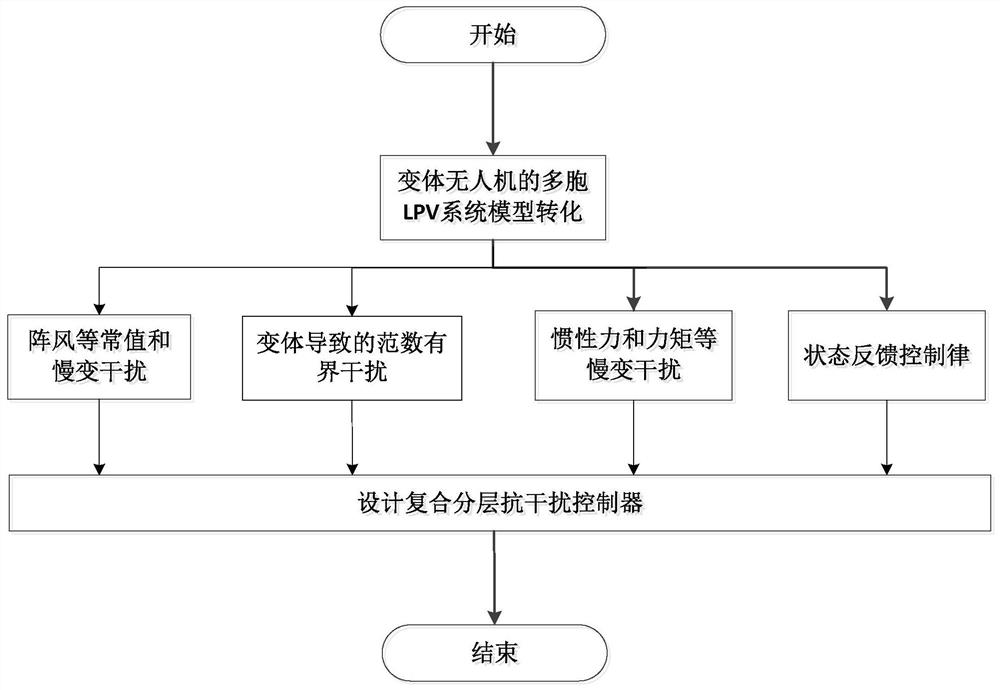
[0047] Such as figure 1 Shown, the specific implementation of the present invention is as follows (the anti-jamming control method of the unmanned aerial vehicle that has changed length and swept wing is described as an example):
[0048] In the first step, the nonlinear model Jacobi of the variant UAV is linearized
[0049] Firstly, the linearization operation is carried out for the nonlinear model of the UAV. These parameters in the variant process are uncertain, internal and external constant value interference, slowly changing bounded interference, and norm bounded interference, and then introduce linearity with additive interference. The linearization model of the item ignoring the interference is as follows:
[0050]
[0051] in, m is the mass of the UAV with variable length and swept wings, T is the thrust of the engine, α is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More