

A Collaborative Method for Soccer Robots Based on Reinforcement Learning
A football robot and reinforcement learning technology, applied in the field of football robot collaboration based on reinforcement learning, can solve problems such as low collaboration efficiency, and achieve the effect of improving watchability and improving collaboration efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
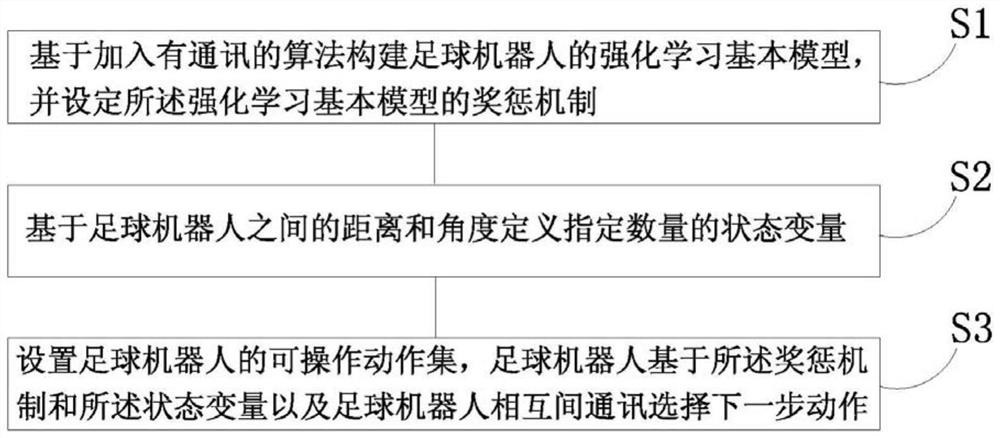
[0023] refer to figure 1 , in an embodiment of the present invention, a football robot collaboration method based on reinforcement learning is provided, specifically including the method:
[0024] S1. Construct the basic reinforcement learning model of the soccer robot based on the Sarsa(λ) algorithm with communication, and set the reward and punishment mechanism r of the basic reinforcement learning model.
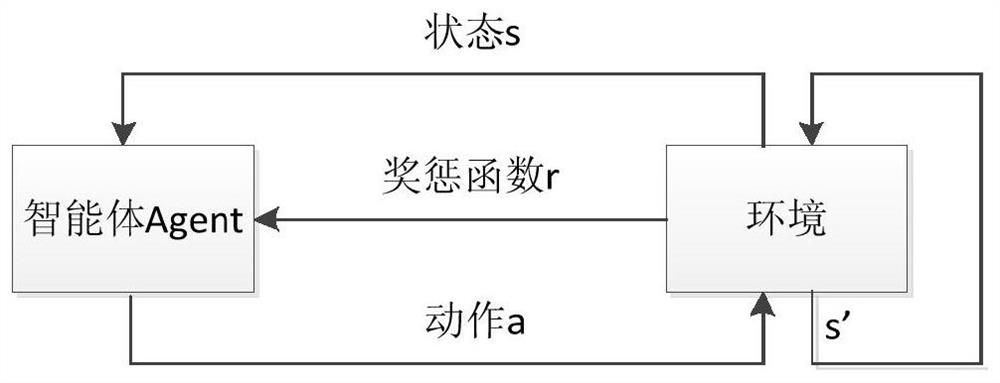
[0025] refer to figure 2 , it can be seen that the principle of the basic model of reinforcement learning is: the football robot chooses an action in the state of perceiving the current environment, and at this time the environment state migrates to a new state, and correspondingly, the new state generates a reinforcement signal to feed back to the football robot, football The robot determines the next action according to the current environment information and the reinforcement signal; wherein, the key of the reinforcement learning of the football robot in the present ...
Embodiment 2
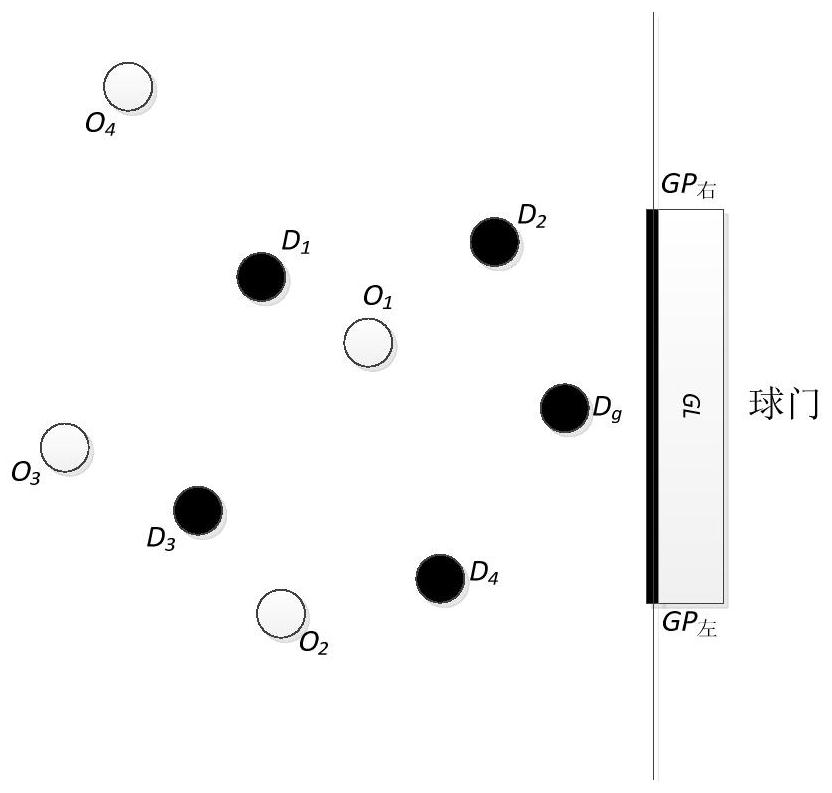
[0090]The method in Embodiment 1 is verified by using the HFO experimental platform, specifically, it consists of m offensive players and n defensive players. Among them, defensive players include goalkeepers, and n≥m. Half-court offensive missions are played on one half of the football field and begin near the half-court line with the ball in the possession of the offensive players; see Figure 4 , the figure shows a classic 4v5 HFO platform, where the white solid circle is the ball, four offensive players, and five defensive players including the goalkeeper; To score a goal successfully, it is necessary to learn the three operations of the offensive player's passing, dribbling and shooting through the basic model of reinforcement learning, and simulate the actions of the defensive player trying to stop the offensive player.
[0091] Preferably, the present invention first carries out 30 groups of experiments to analyze errors between football robots having communication and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More