

A mobile platform for picking and placing warehouse commodities and a path planning method for the mobile platform
A mobile platform and product technology, applied in the field of mobile robots, can solve problems such as difficult grasping, large distance between force application point and force receiving point, and poor obstacle avoidance ability, so as to ensure accuracy, reduce feed rate, and increase reliability. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
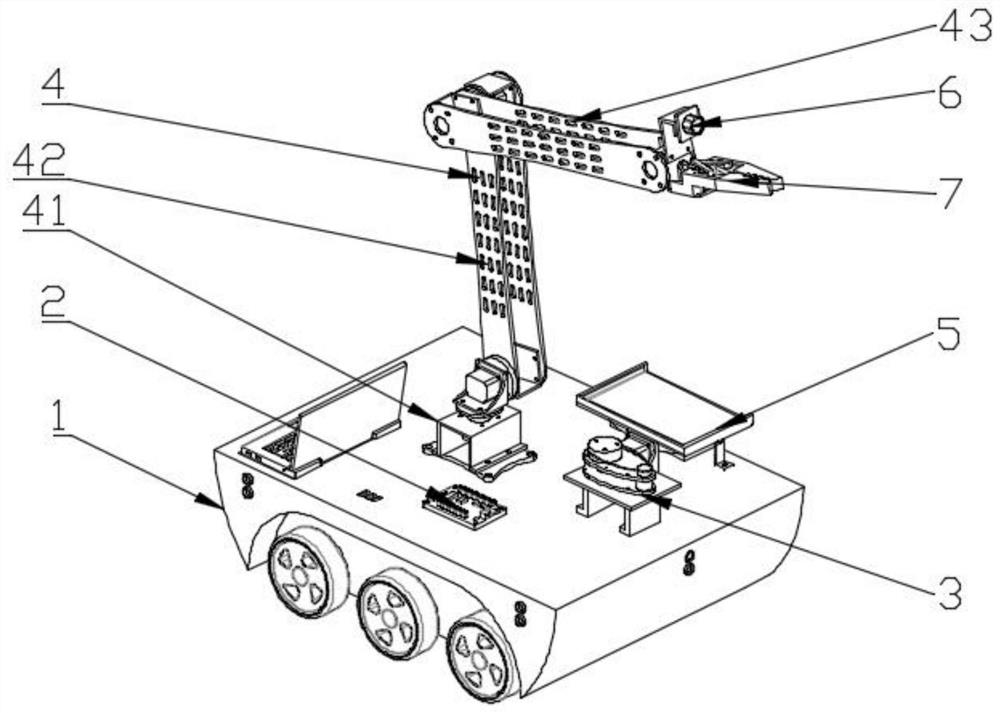
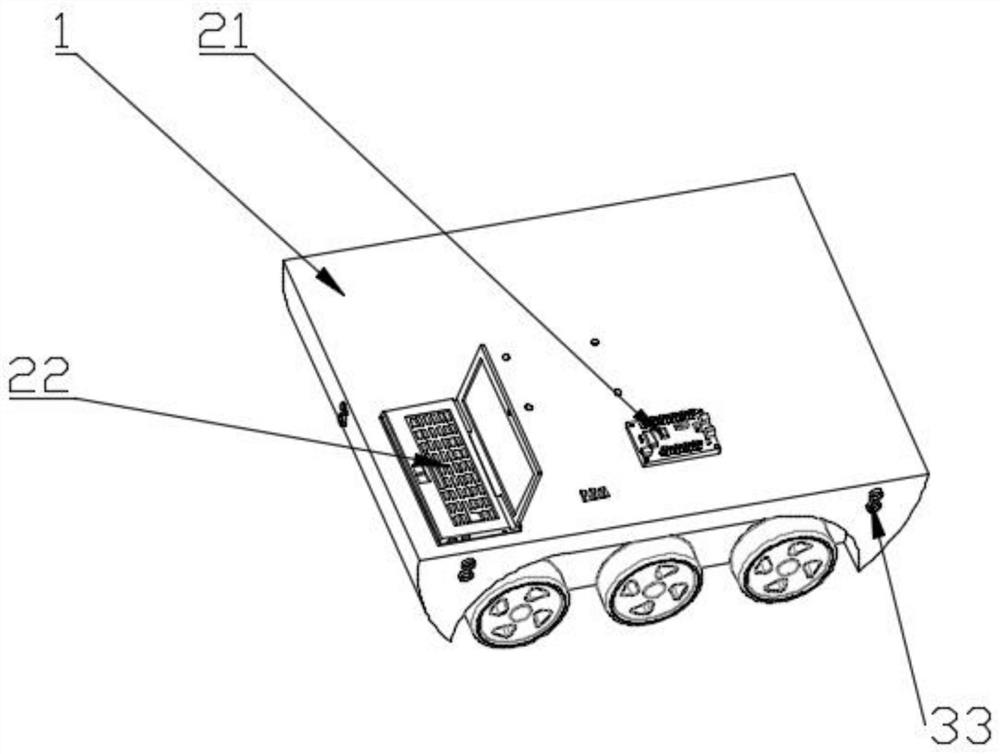
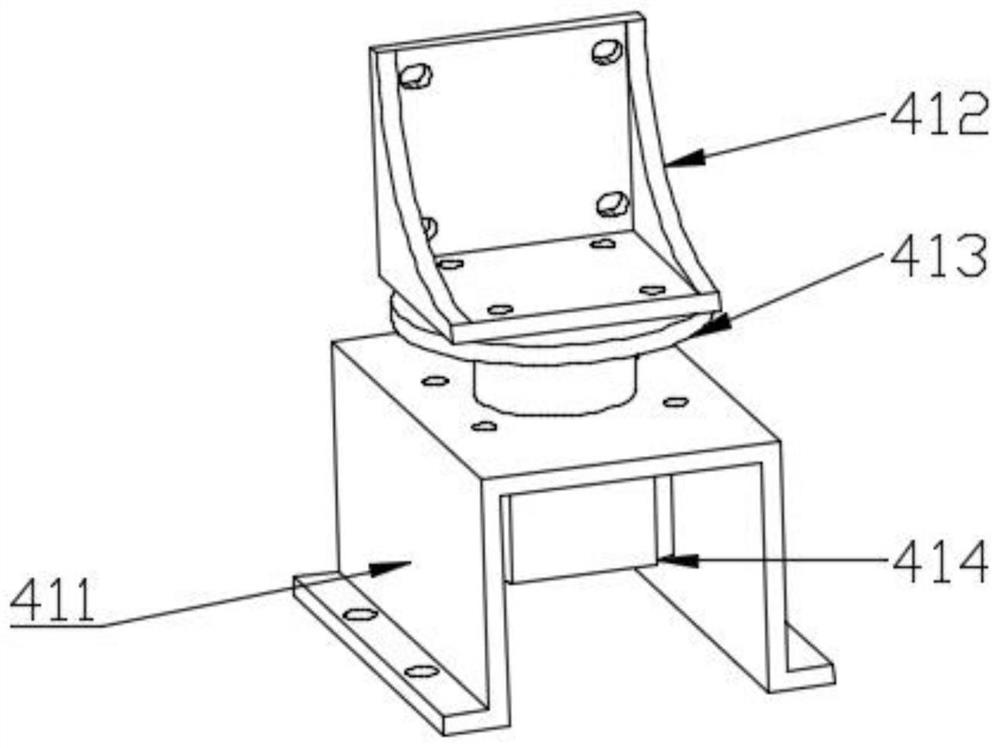
[0055] The invention provides a mobile platform for picking and placing stored goods (abbreviated as a mobile platform, see Figure 1-13 ), the mobile platform includes a mobile platform body 1, a control system 2, an obstacle avoidance device 3, a mechanical arm device 4, a product placement device 5, a product identification device 6 and a product grabbing device 7; the control system 2, the obstacle avoidance device 3, The mechanical arm device 4 and the commodity placement device 5 are installed on the mobile platform body 1, the obstacle avoidance device 3 is located at the front end of the mobile platform body 1, and the commodity placement device 5 is located in the reachable area of the mechanical arm of the mechanical arm device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More