

Soft finger with friction force being adjustable online
A technology of friction and software, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of easy falling off, unstable grasping, constant friction, etc., to achieve unstable grasping, simple structure, easy production easy effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
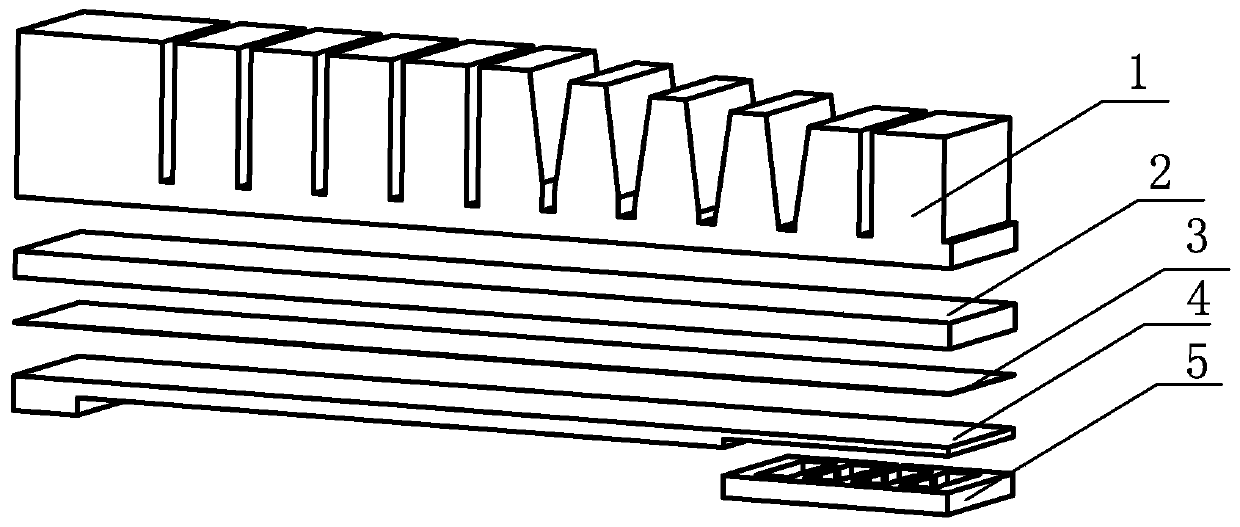
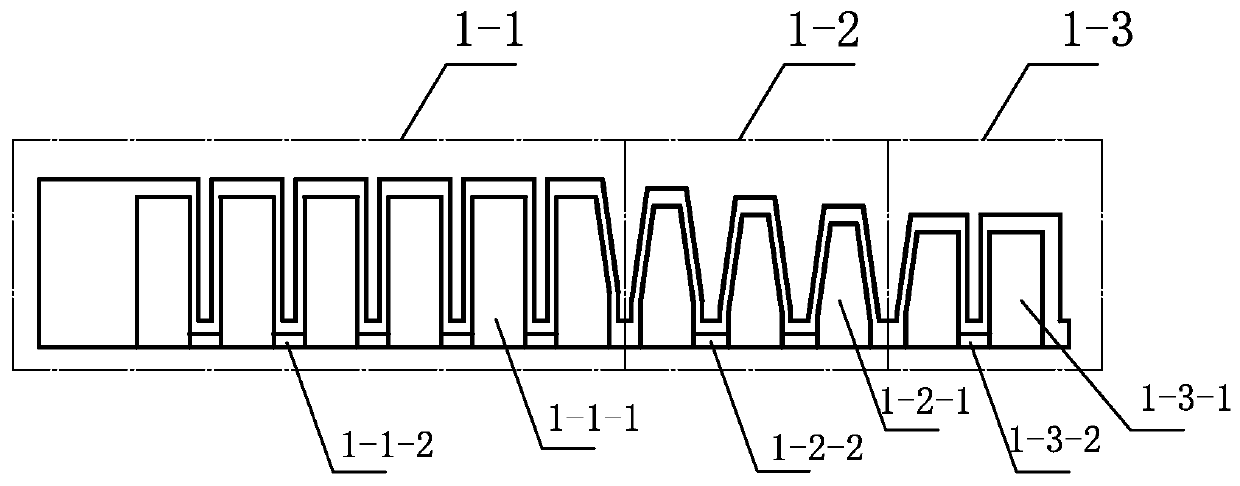
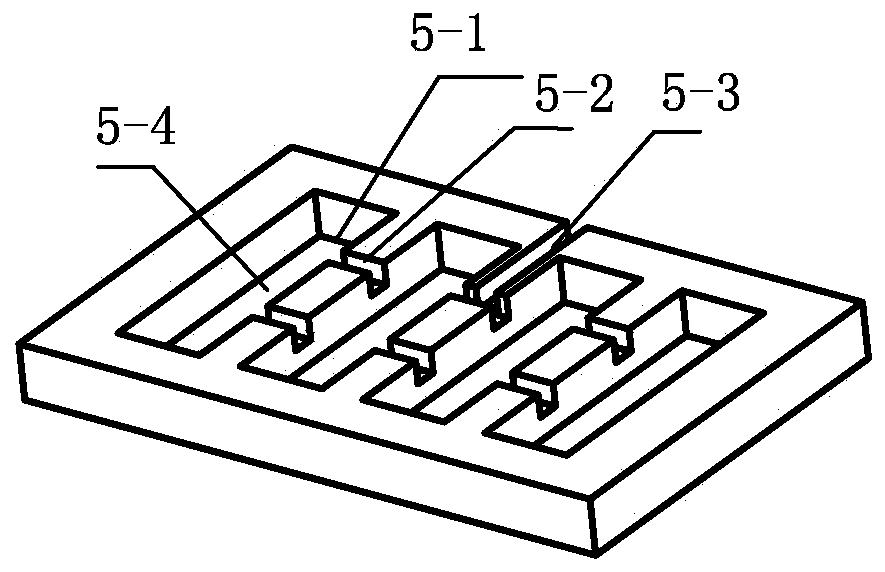
[0025] The structure diagram of the online adjustable soft finger of the present invention is as follows: Figure 1-Figure 3 As shown, it includes a substrate and a variable-friction actuator module 5, and the variable-friction actuator module 5 is provided on the side of the substrate that is in contact with the object. The variable friction actuator module 5 includes an elastic film 5-4, at least one air cavity 5-2 is sealed between the elastic film 5-4 and the substrate; the gas entering the air cavity 5-2 drives The elastic membrane 5-4 is deformed. Adjusting the pressure of the gas controls the degree of deformation of the elastic membrane 5-4 to achieve online adjustment of the friction force. The base body includes a soft actuator 1, and the soft actuator 1 includes a fingertip actuator module 1-3, a finger middle actuator module 1-2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More