

Foot drop rehabilitation exoskeleton robot and self-adaptive gait auxiliary control method
An exoskeleton robot and foot drop technology, applied in the field of medical equipment, can solve the problems of patients who cannot provide foot drop, rehabilitation training, etc., and achieve the effect of simple structure, flexible wear, and guaranteed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the embodiments, technical solutions and advantages of the present invention more obvious, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Example. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
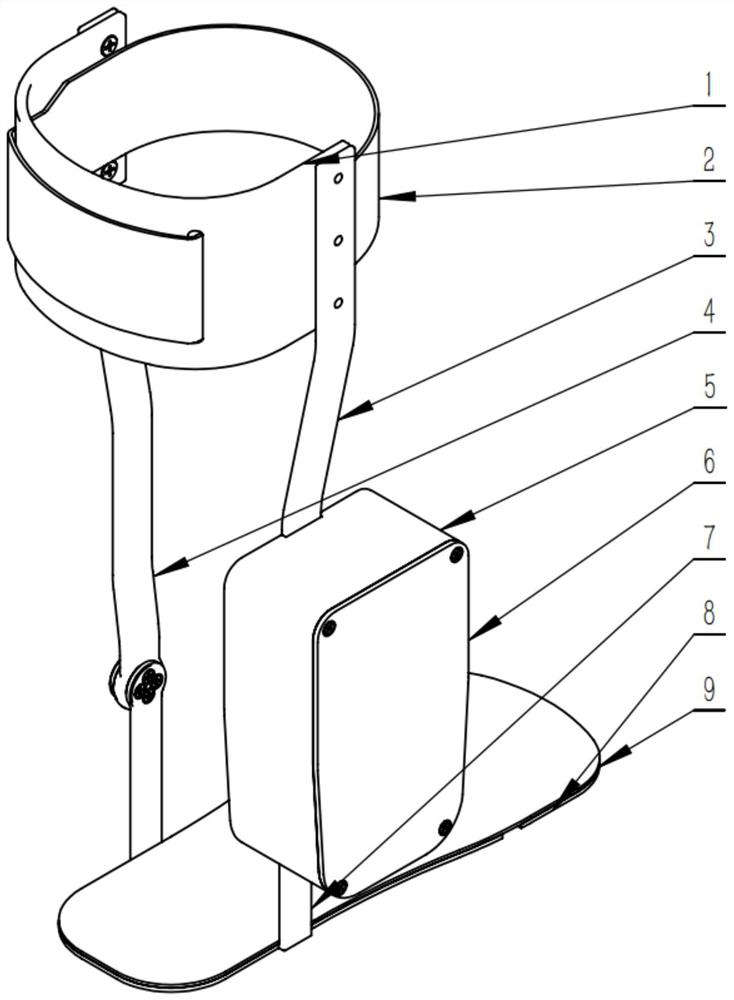
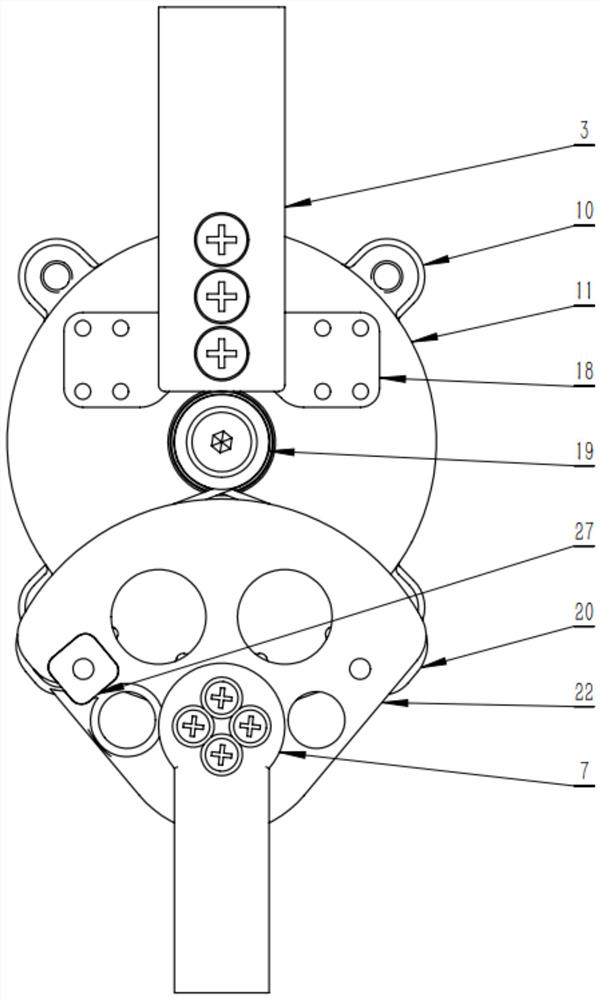
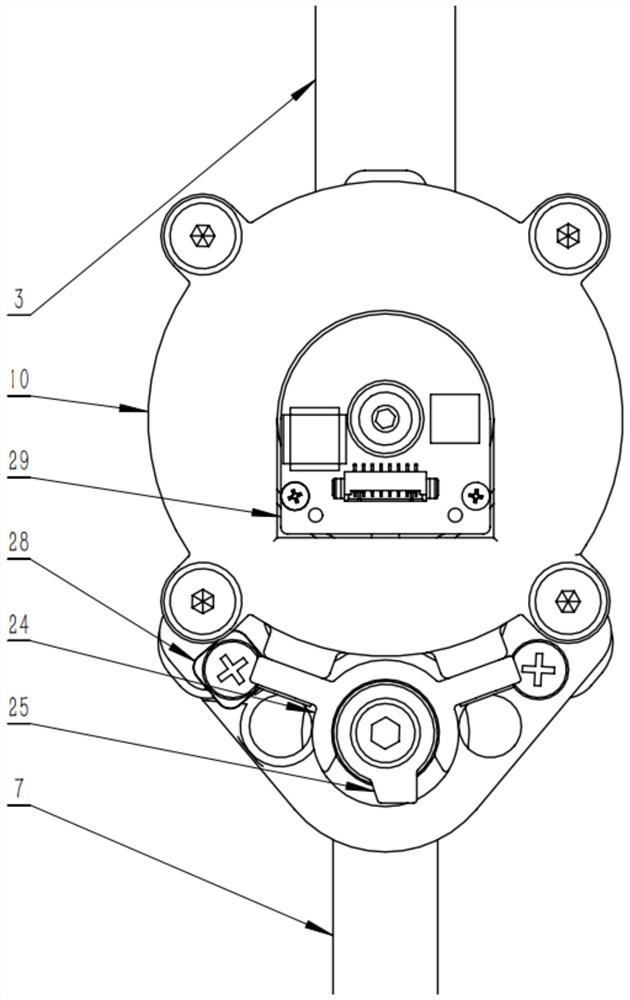
[0048] In order to enable stroke patients to walk normally, this patent designs a portable exoskeleton rehabilitation robot for foot drop rehabilitation, which uses sensors to record patient kinematics and dynamics data, and recognizes human motion intentions in real time in the main control module , under the drive of the motor, it imitates the normal gait of healthy people, and realizes the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More