

Four-rotor aircraft formation sliding mode control method based on event triggering mechanism
A four-rotor aircraft and event-triggered technology, which is applied in attitude control, control/adjustment system, non-electric variable control, etc., can solve the problems of frequent communication and achieve the effects of prolonging flight time, saving energy and reducing communication frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
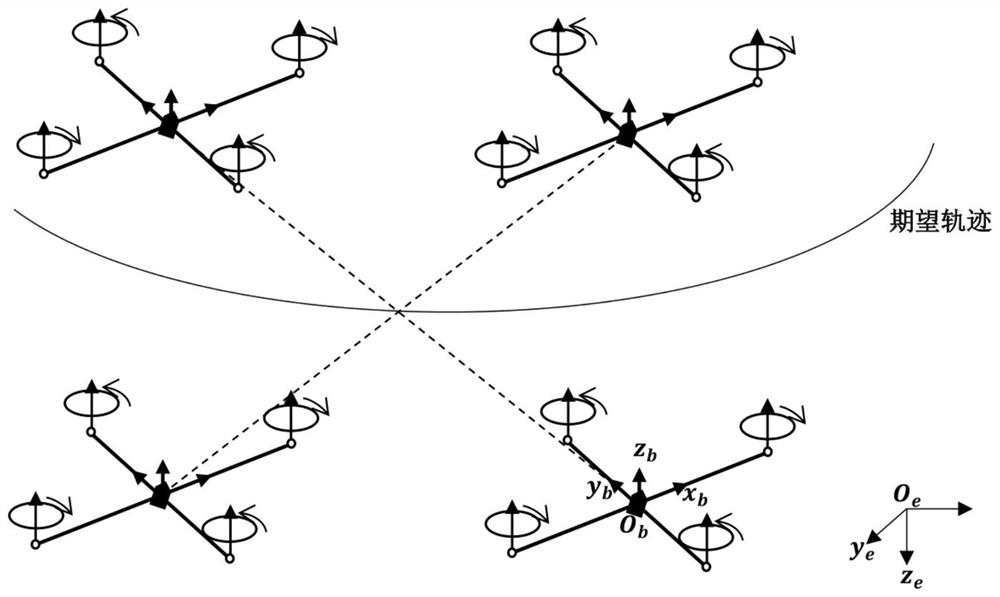
[0151] Such as figure 1 As shown, the goal is to design the formation controller, so that the four quadrotors can maintain the desired formation and fly on the desired trajectory under the leadership of the virtual leader.
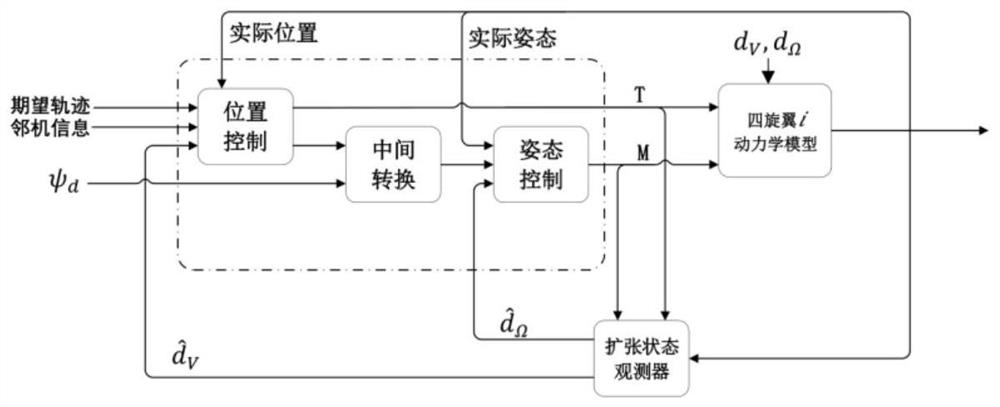
[0152] Such as figure 2 As shown, the control structure of the quadrotor aircraft in the formation can be decoupled into the outer loop position subsystem and the inner loop attitude subsystem, and the information of adjacent quadrotor aircraft can be obtained.
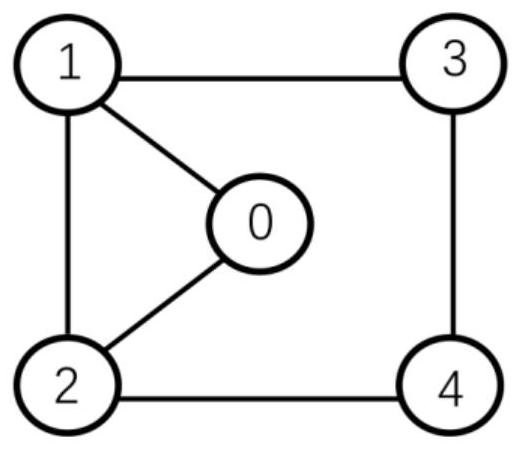
[0153] Such as image 3 As shown in , it represents the communication topology of the quadrotor aircraft formation, where 0 represents the virtual leader, and 1-4 represent four quadrotor aircraft. The adjacency matrix and connectivity matrix can be expressed as
[0154]
[0155]
[0156] Such as Figure 4 As shown, it can be seen that the estimation error of the extended state observer can quickly converge to 0, indicating that the extended state observer meets the system requirements....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More