

Artificial lower limb motion intention recognition algorithm based on BPSOGWO-KNN
A motion intention and recognition algorithm technology, applied in the field of pattern recognition, can solve problems such as unsatisfactory effects, and achieve the effect of improving the accuracy of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
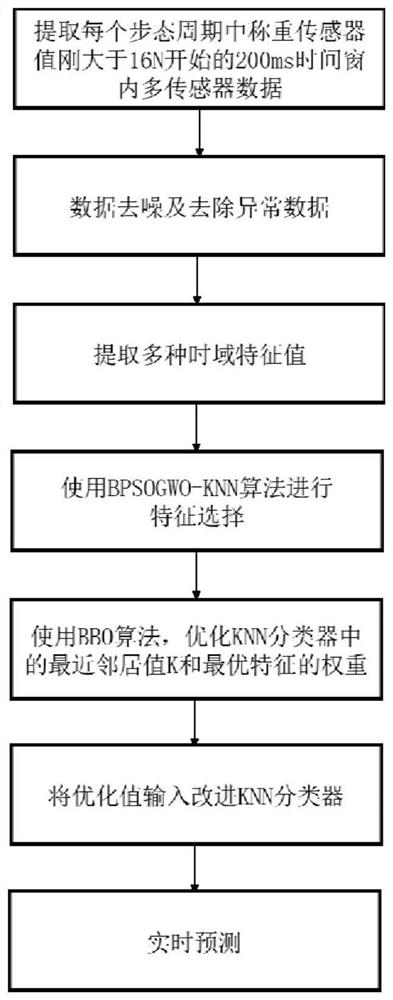
[0071] like figure 1 As shown, a lower limb prosthetic movement intention recognition algorithm based on BPSOGWO-KNN, the method includes the following steps:
[0072] 1.1. Obtain the motion data collected by each sensor in the knee prosthesis, including the following steps:
[0073] 1.1.1. Use the knee joint angle sensor, load cell and IMU sensor placed on the knee prosthesis to collect 8 disabled subjects to perform slow horizontal walking, normal speed horizontal walking, fast horizontal walking, uphill, downhill Data during slope, sitting, standing, going up and down stairs; before collecting data, each subject had to wear a prosthesis for ten hours of adaptive training; 8 disabled subjects included a female subject ;
[0074] 1.1.2. The data collected by the sensor includes: knee joint angle, ground reaction force, IMU sensor X-axis acceleration, IMU sensor Y-axis acceleration, IMU sensor Z-axis acceleration, IMU sensor X-axis angular velocity, IMU sensor Y-axis angular...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More