

Scheduling, organization and cooperation system and method for multi-robot system
A multi-robot, collaborative system technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve problems such as reducing the amount of communication, reduce communication amount, reduce information interaction, improve dynamic environment and complex dynamic tasks. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0046] One, train of thought of the present invention:
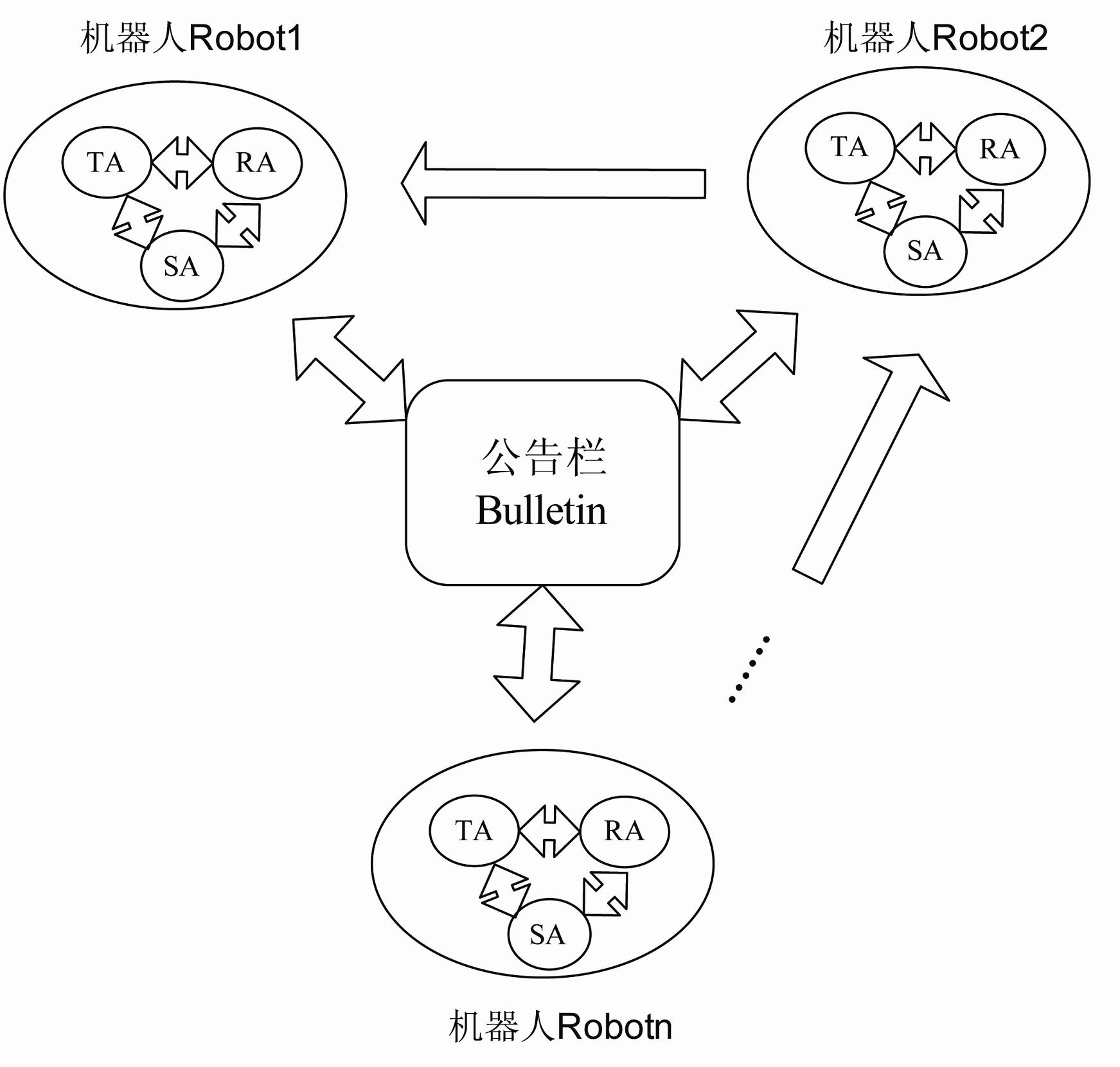
[0047] With the development of computing technology, the in-depth research of multi-robot technology and the continuous expansion of application fields, the number of robot applications is also expanding, and the functions of robots are also constantly enriched. The communication pressure and coordination difficulty between robots will increase. Large, making research on issues such as the formation of robotic tissue and the solution mechanism based on robotic tissue more and more important, how to be intelligent. This mechanism proposes distributed organization models, bulletin boards, dynamic decision makers and other ideas to solve the problems of how to reduce communication traffic, improve problem-solving capabilities, improve resource utilization, and better adapt to dynamic environments a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More