

Method for controlling four-rotor aircraft system based on human-computer interaction technology
A four-rotor aircraft, human-computer interaction technology, applied in the direction of control start-up methods, instruments, automatic manipulation, etc., can solve complex problems, and achieve the effect of precise flight positioning operation and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The first part realizes the method of controlling the spatial position of the quadrotor aircraft by moving the position of the hand
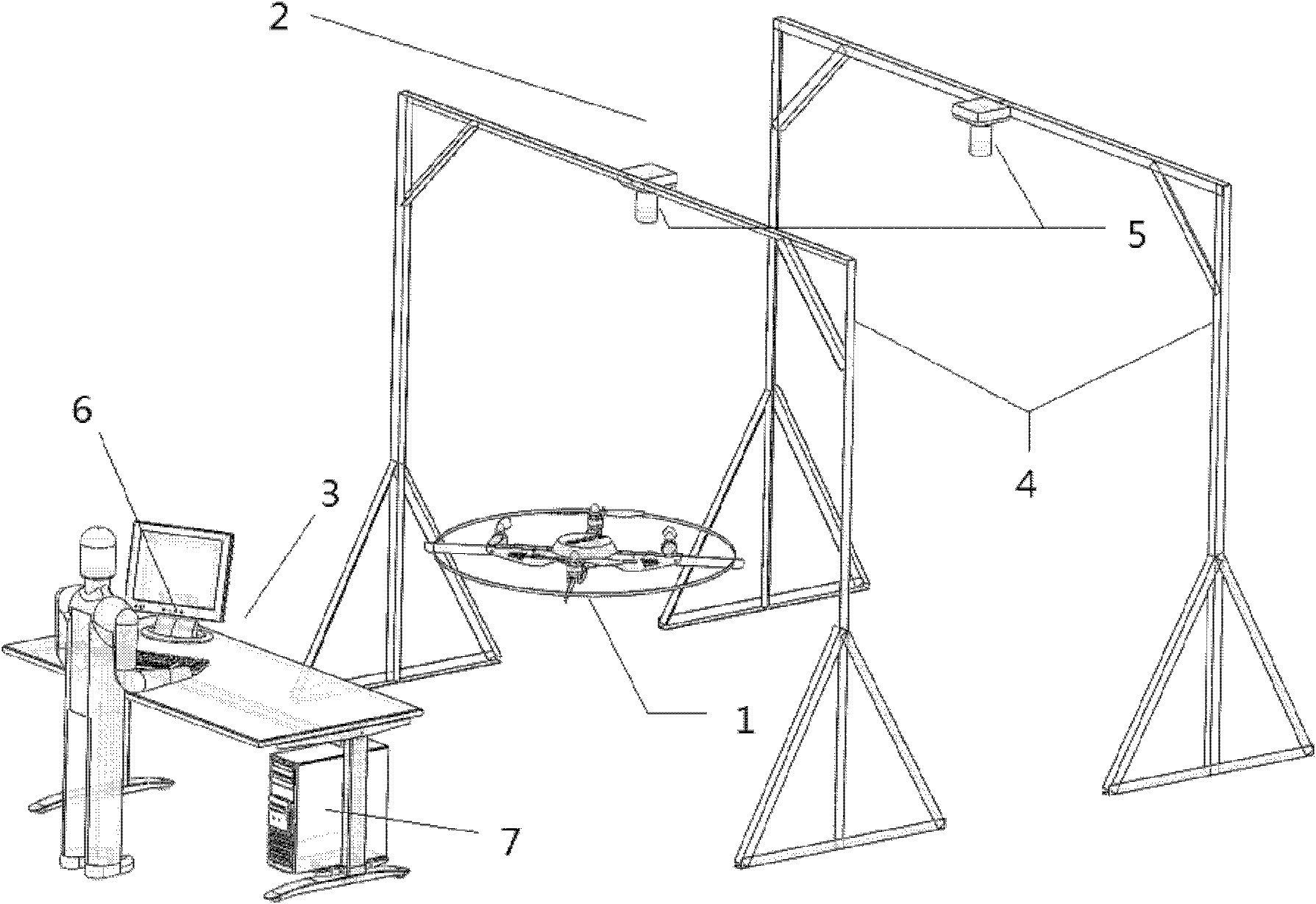
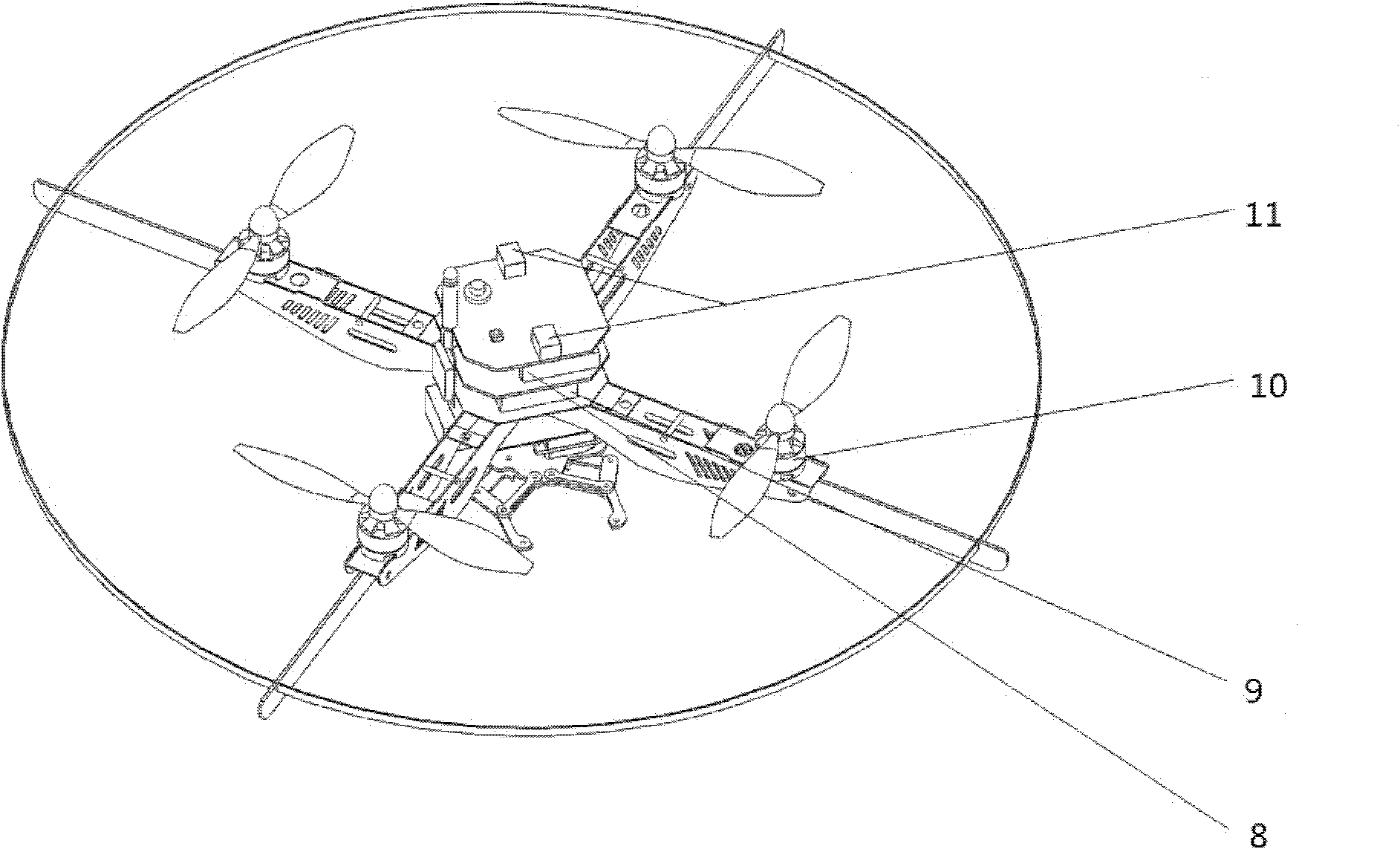
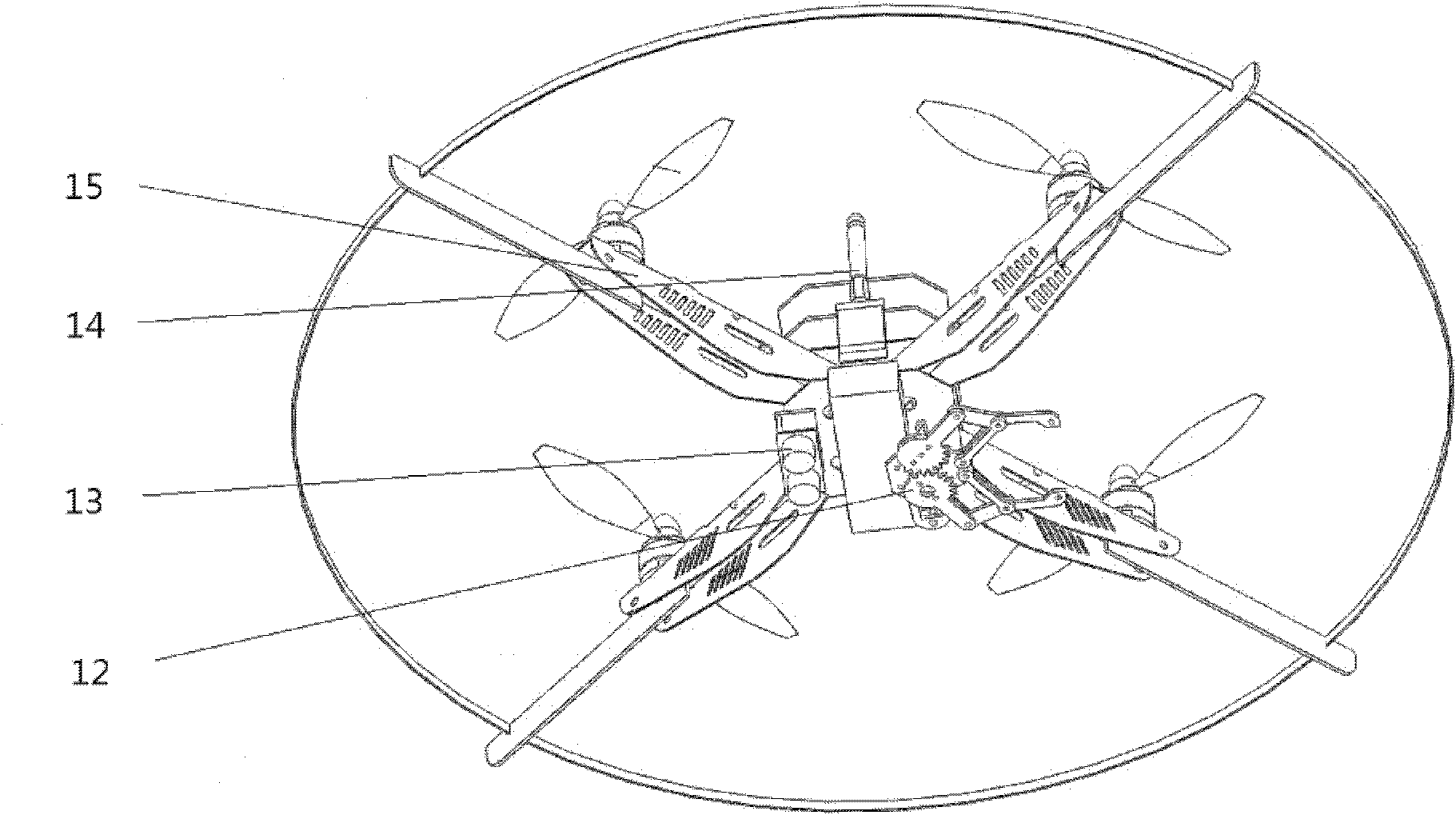
[0026] Step 1: By triggering the onboard ultrasonic ranging module 13 of the quadrotor aircraft, a pulse signal positively correlated with the time difference of the trigger signal and the height of the quadrotor aircraft is obtained, and is captured and measured by the onboard microcontroller MC9S12XS128 of the quadrotor aircraft This time difference obtains the altitude information of the quadrotor aircraft, and then is processed as a decimal number represented by ASCII code and transmitted to the computer through the ZigBee wireless communication module 14;
[0027] Step 2: Use the ambient infrared camera to capture the infrared light reflected by the two infrared reflective cloths 11 symmetrically arranged on the upper surface of the quadrotor aircraft (other wave bands are filtered by infrared filters), and convert this optical signal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More