

Stereo matching optimization method of binocular visual system
A binocular vision system and stereo matching technology, applied in the field of computer vision, can solve problems such as unsatisfactory, complex calculation factors, unsatisfactory stereo matching speed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
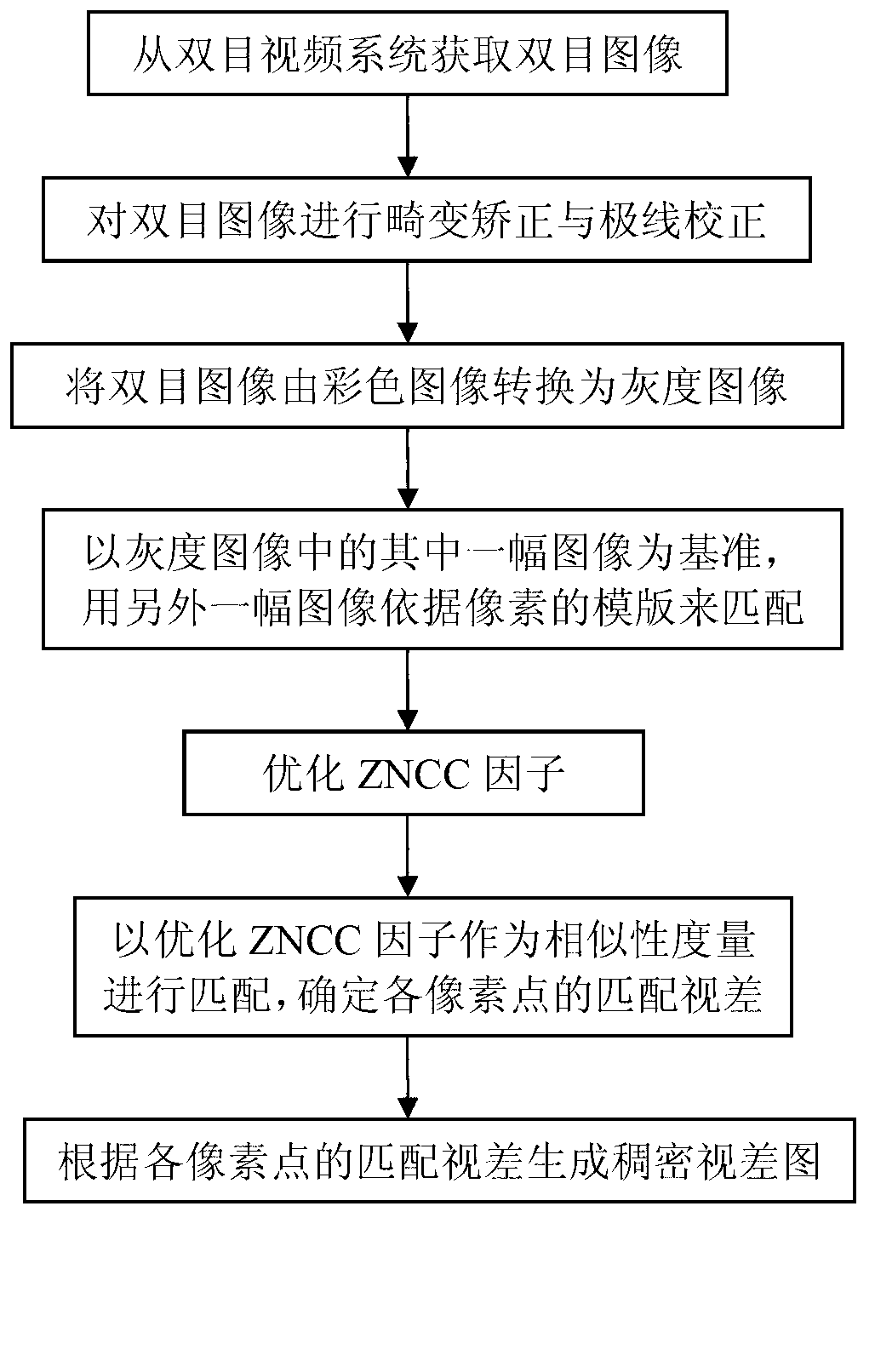
[0058] Such as figure 1 As shown, the stereo matching optimization method of the binocular vision system of the present invention comprises the following steps:
[0059] a. Obtain binocular images from a binocular video system;
[0060] b. Perform distortion correction and epipolar line correction on the binocular image;
[0061] c. Convert the binocular image from a color image to a grayscale image;
[0062] d. Based on the left image in the binocular image converted to a grayscale image, use the right image to match the pixel-based template;
[0063] e. Optimize the ZNCC factor;
[0064] f. Use the optimized ZNCC factor as a similarity measure to perform matching calculations to determine the matching parallax of each pixel;
[0065] g. Generate a dense disparity map based on the matching disparity of each pixel.
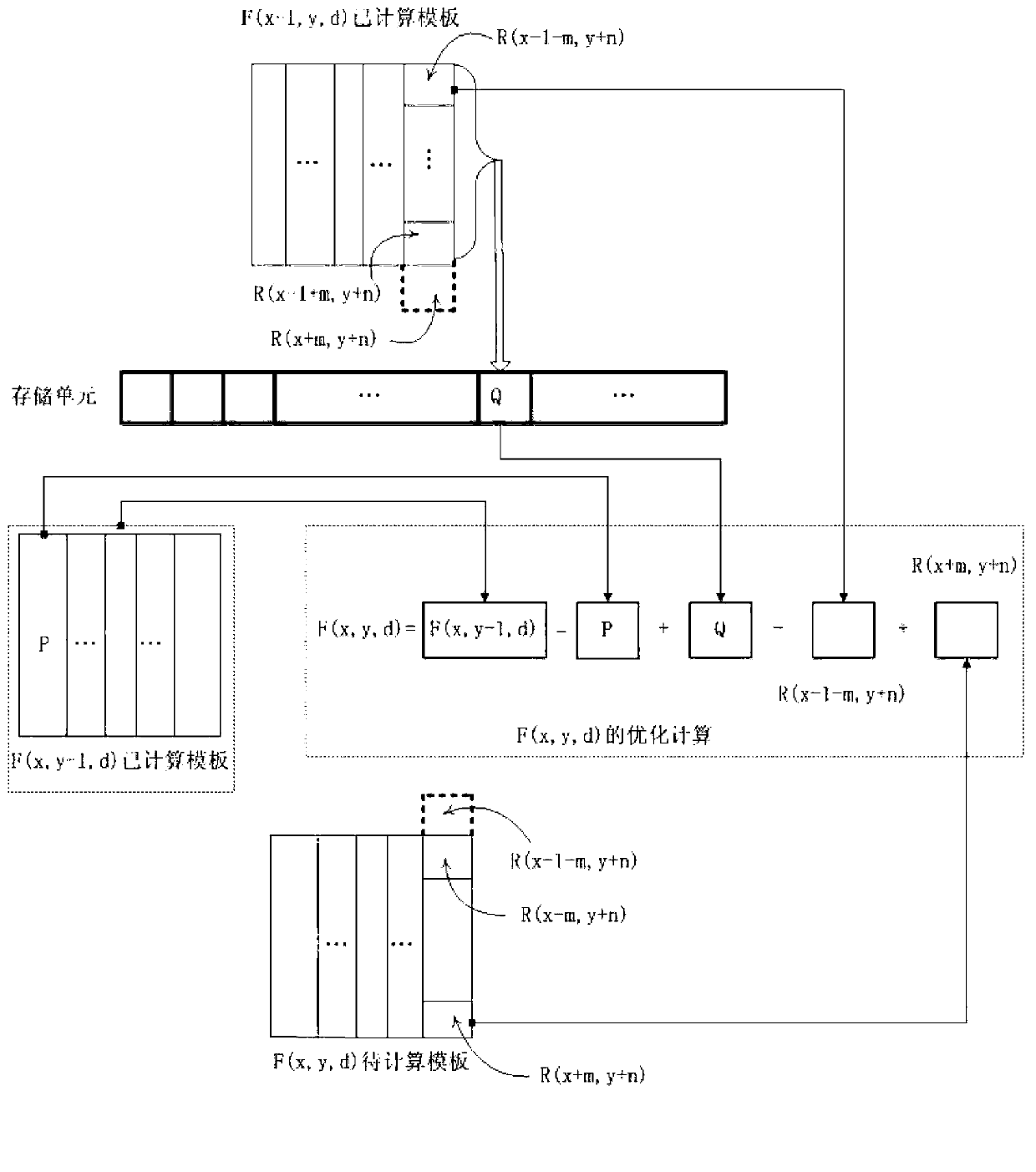
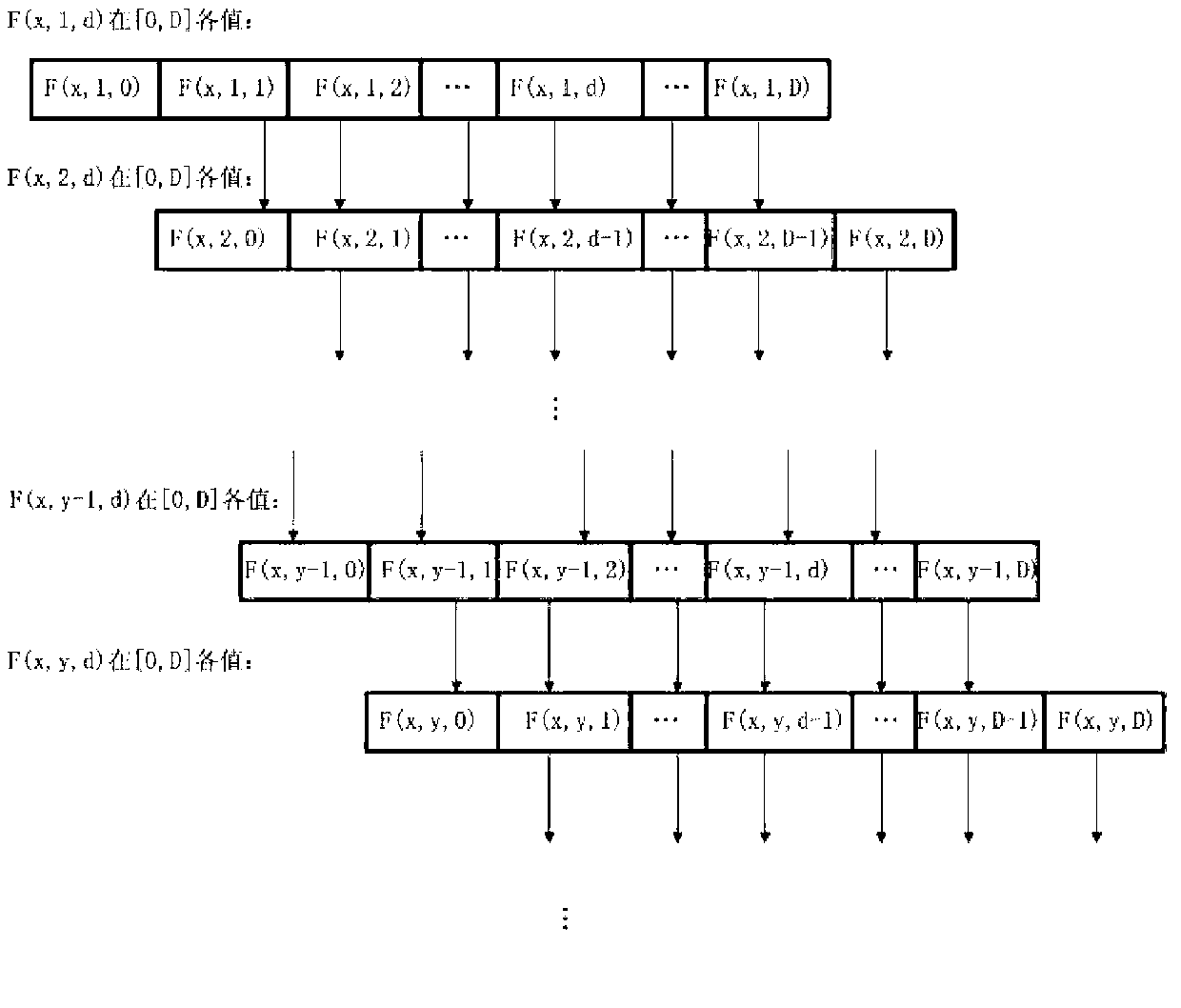
[0066] Such as figure 2 As shown, the calculation diagram of F(x,y,d) here is suitable for the four sum values SI in the ZNCC factor 1 (x,y), SI 2 (x,y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More