

Four-rotor aircraft
A technology of four-rotor aircraft and eight-rotor aircraft, which is applied in the field of aircraft, can solve problems such as weak yaw ability, achieve the effect of improving yaw ability, reducing energy consumption, and improving yaw ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
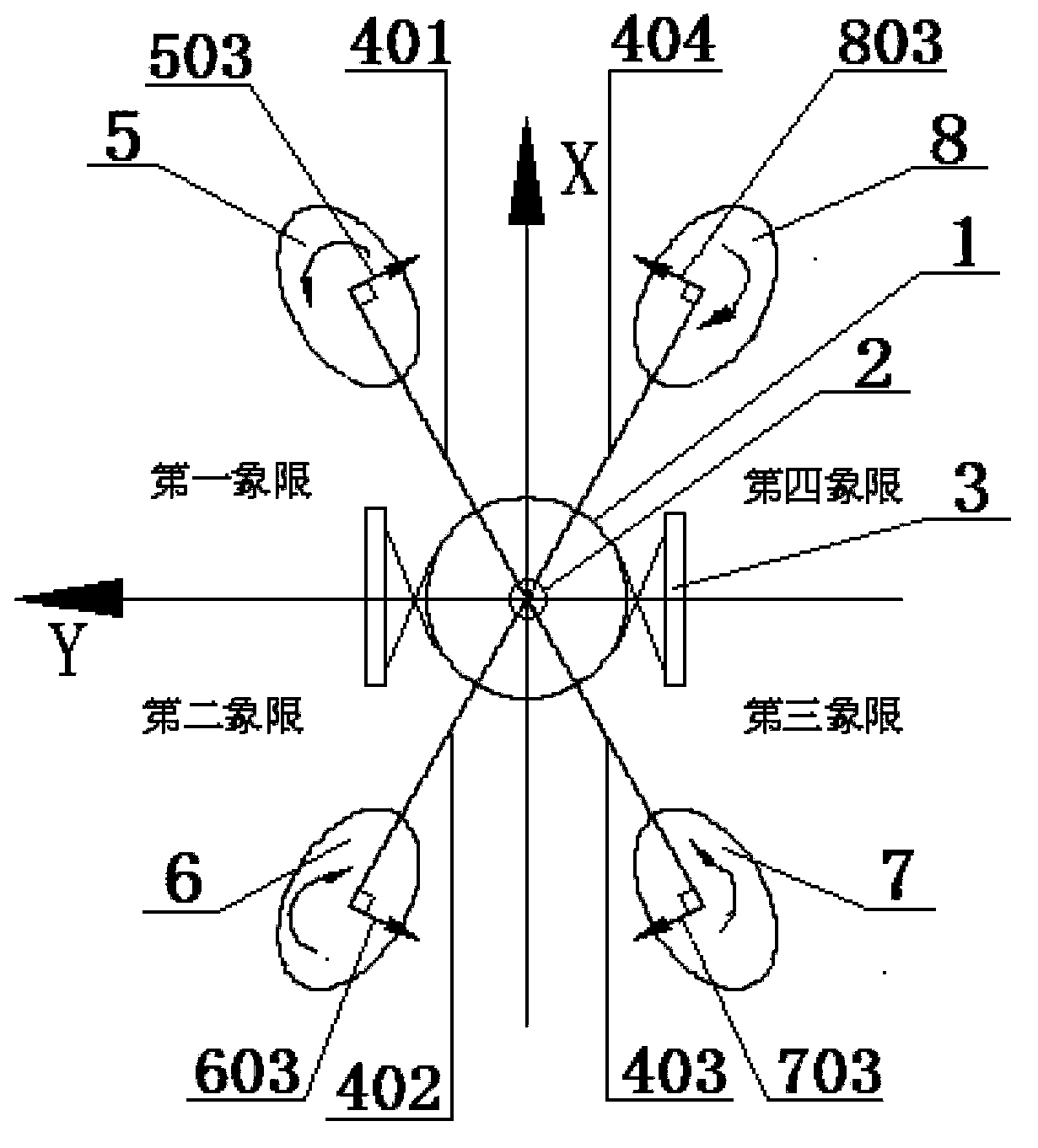
[0042] Specific implementation mode one, such as figure 1 As shown, set the center of mass of the aircraft as the origin o of the body coordinate system, the x-axis, y-axis, and z-axis are perpendicular to each other, the y-axis is to the left in the paper, the z-axis is perpendicular to the paper, and the x-axis is in the paper Upward, the xoy plane is divided into four quadrants, the x-axis direction is set as the nose direction of the aircraft, and the z-axis points upward along the longitudinal plane of the aircraft.
[0043] Four equal-length support arms are detachably mounted on the body 1 through a hinge structure, and each support arm is connected to the avionics system 2. The first support arm 401 and the third support arm 403 are on the xoy plane of the body coordinate system The projections of the second support arm 402 and the fourth support arm 404 are collinear in the body coordinate system xoy plane, and the projections of the first support arm 401 and the four...
specific Embodiment approach 2
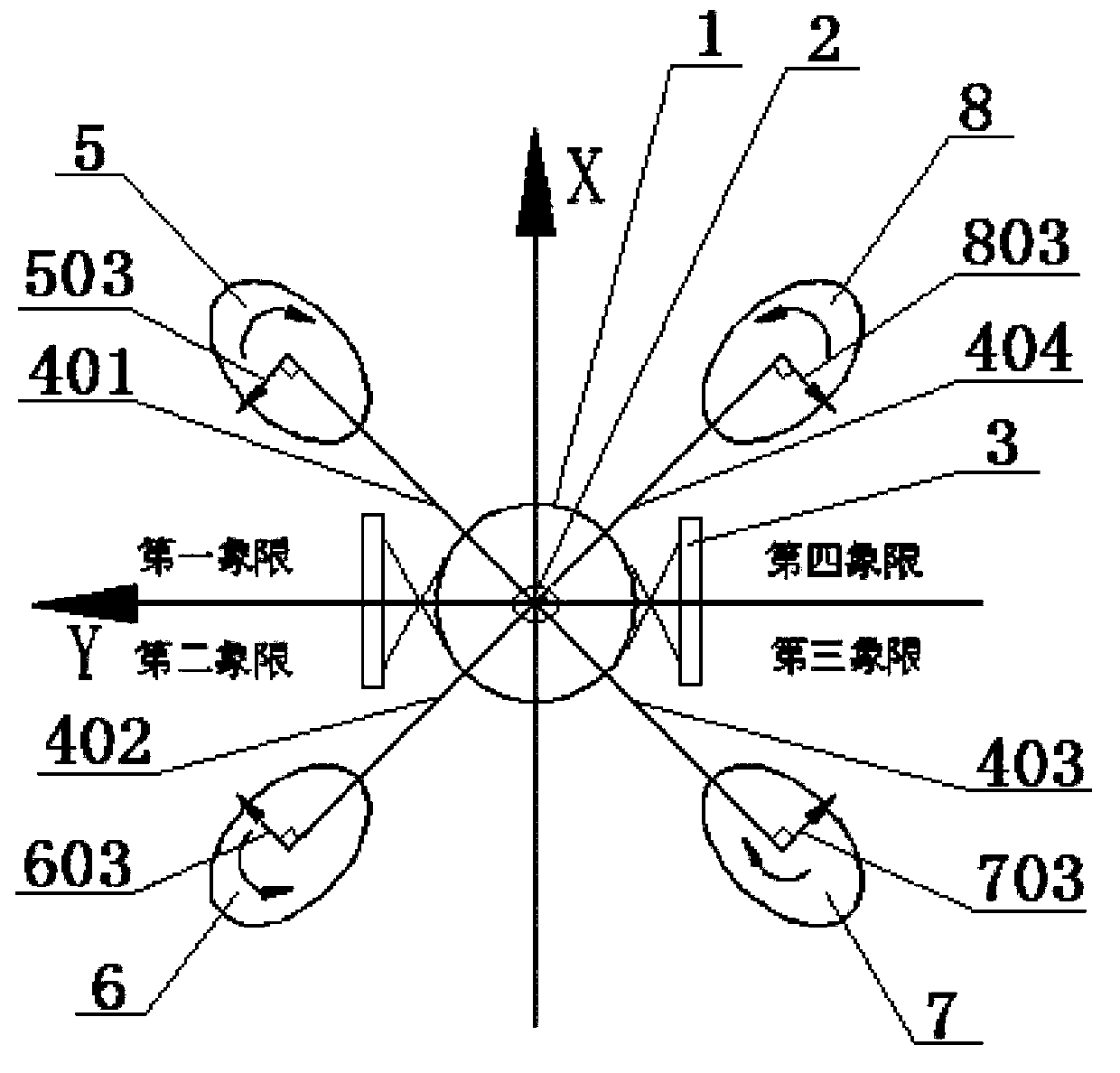
[0052] Specific implementation mode two, such as image 3 As shown, set the center of mass of the aircraft as the origin o of the body coordinate system, the x-axis, y-axis, and z-axis are perpendicular to each other, the y-axis is to the left in the paper, the z-axis is perpendicular to the paper, and the x-axis is in the paper Upward, the xoy plane is divided into four quadrants, the x-axis direction is set as the nose direction of the aircraft, and the z-axis points upward along the longitudinal plane of the aircraft.
[0053] Four equal-length support arms are detachably mounted on the body 1 through a hinge structure, and each support arm is connected to the avionics system 2. The first support arm 401 and the third support arm 403 are on the xoy plane of the body coordinate system The projections of the second support arm 402 and the fourth support arm 404 on the body coordinate system xoy plane are collinear, and the projections of the first support arm 401 and the four...
specific Embodiment approach 3
[0061] Specific implementation mode three, such as Figure 5 As shown, set the center of mass of the aircraft as the origin o of the body coordinate system, the x-axis, y-axis, and z-axis are perpendicular to each other, the y-axis is to the left in the paper, the z-axis is perpendicular to the paper, and the x-axis is in the paper Upward, the xoy plane is divided into four quadrants, the x-axis direction is set as the nose direction of the aircraft, and the z-axis points upward along the longitudinal plane of the aircraft.
[0062] Four equal-length support arms are detachably mounted on the body 1 through a hinge structure, and each support arm is connected to the avionics system 2. The first support arm 401 and the third support arm 403 are on the xoy plane of the body coordinate system The projections of the second support arm 402 and the fourth support arm 404 on the body coordinate system xoy plane are collinear, and the projections of the first support arm 401 and the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More