

Gripping function evaluating and training system
A training system and functional technology, applied in the medical field, can solve problems such as low degree of automation, less comprehensive rehabilitation evaluation, and lack of examples, and achieve the effect of improving training tolerance, fun and controllability, and fun
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and specific implementations. Obviously, the specific implementations described in this specification are only part of the implementations of the present invention, not all of them. Based on the implementations given in the present invention, all other implementations obtained by persons of ordinary skill in the art without creative work fall within the protection scope of the present invention.
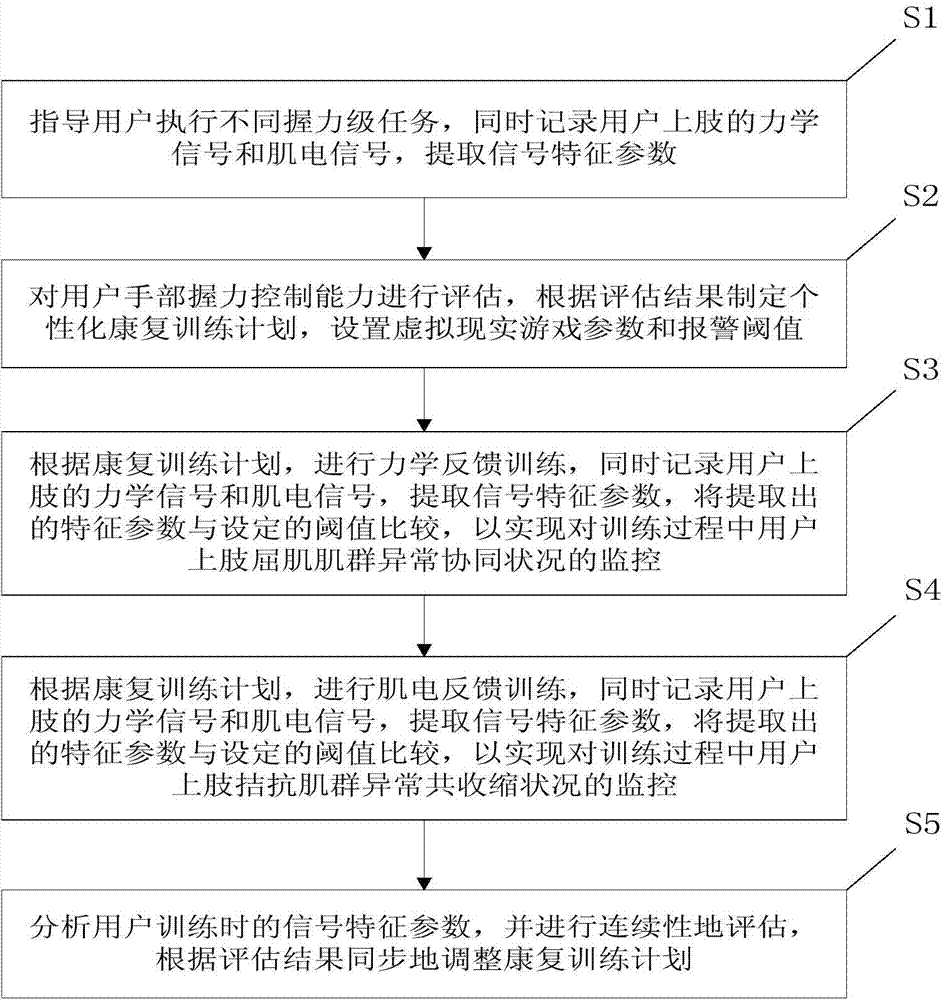
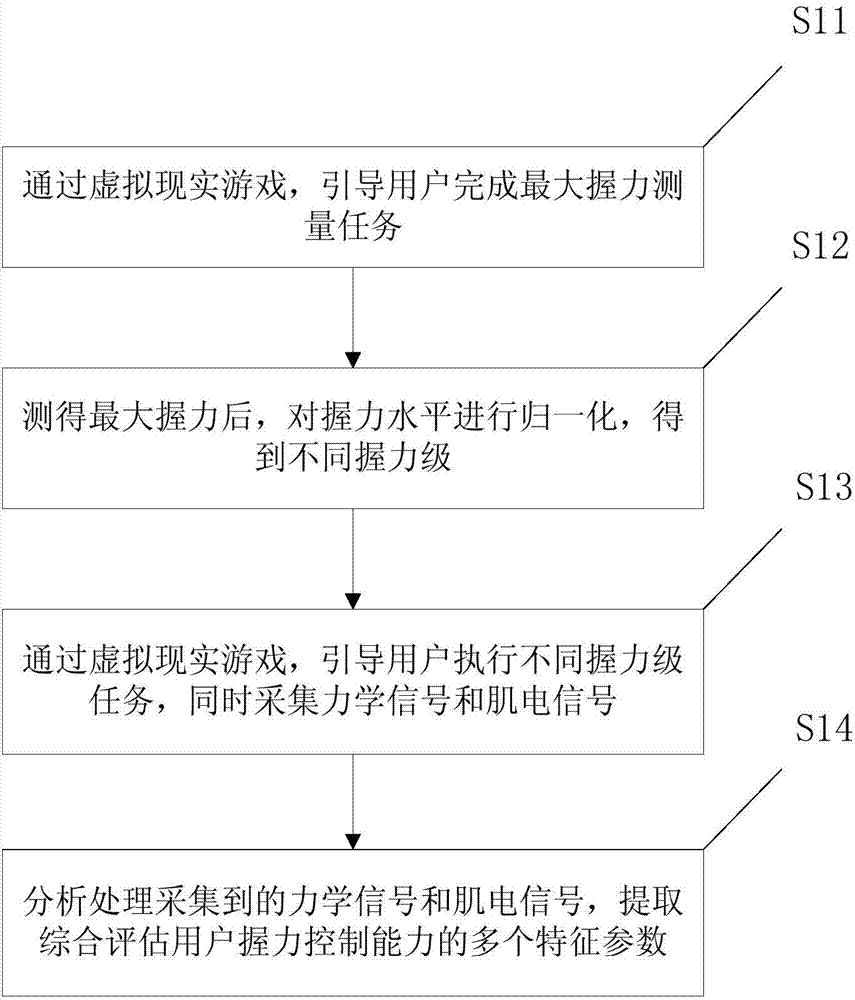
[0033]The invention provides a grasping function evaluation and training system, which can realize grip control ability evaluation and rehabilitation training methods. Firstly, by setting tasks of different grip levels, analyzing the mechanical signals and electromyographic signals collected during the tasks, and extracting multiple A signal characteristic parameter is used to evaluate the grip control ability of stroke users, and the eva...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More