

A method for real-time adjustment of robot running speed
A real-time adjustment, robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of speed adjustment that cannot be well applied in the field of robot control, heavy workload of on-site operators, and many branches of the control process. Smooth changes, soft control effects, and low computational cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The method of the present invention will be described in further detail below in conjunction with specific embodiments.
[0037] The application object of the present invention is a robot. When the robot performs automatic operations on the station, the operator needs to program the various operation steps required for the robot operation by debugging the monitoring terminal according to the specific operation requirements, and then follow the teaching instructions. The trajectory control robot performs automatic processing operations to realize the motion control of the robot.
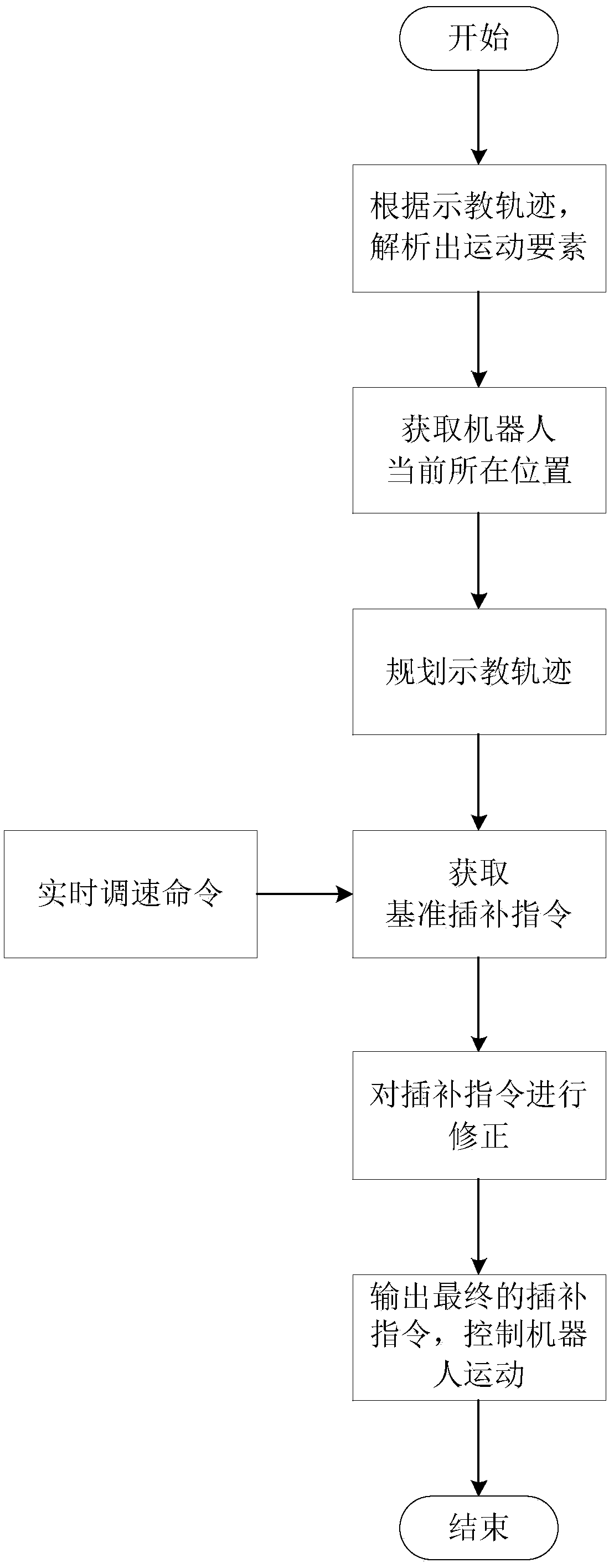
[0038] The present invention provides a real-time adjustment method for the running speed of a robot aiming at the speed control in the process of robot movement, and the specific implementation includes the following steps:
[0039] According to the operation requirements, the operator uses the robot to debug the monitoring terminal, usually a hand-held teaching pendant, to teach the processin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More