

Binocular stereoscopic vision type food identification method
A technology of binocular stereo vision and recognition method, applied in the field of food recognition, can solve the problem of inability to perform accurate recognition, and achieve the effect of accurate and reliable recognition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
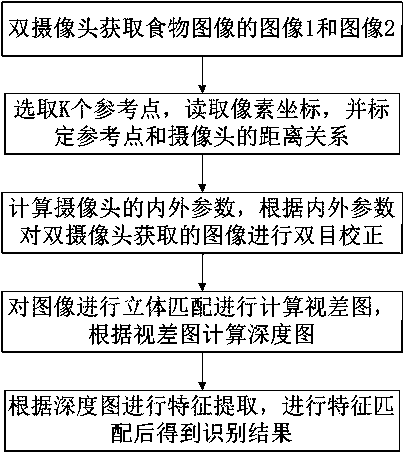
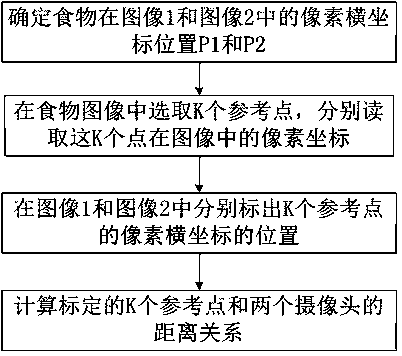
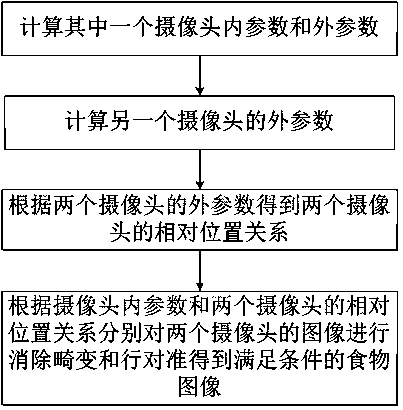
[0016] Such as figure 1 As shown, a binocular stereo vision food recognition method includes the following steps: S1, dual cameras acquire image 1 and image 2 of food images; S2, select K reference points, read pixel coordinates, and calibrate the reference points and cameras S3, calculate the internal and external parameters of the camera, and perform binocular correction on the images acquired by the dual cameras according to the internal and external parameters; S4, perform stereo matching on the images to calculate the disparity map, and calculate the depth map according to the disparity map; S5, according to the depth map Feature extraction is performed, and the recognition result is obtained after feature matching. A binocular stereo vision food recognition method according to the present invention obtains food images at different angles by setting dual cameras, establishes a three-dimensional space on the basis of two angle information, and recognizes overlapped and blo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More