

Autonomous balance bicycle mechanical power system and a multi-rigid-body dynamic model thereof
A technology of mechanical power and mechanical system, applied in the field of self-balancing bicycle mechanical power system and its multi-rigid body dynamic model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
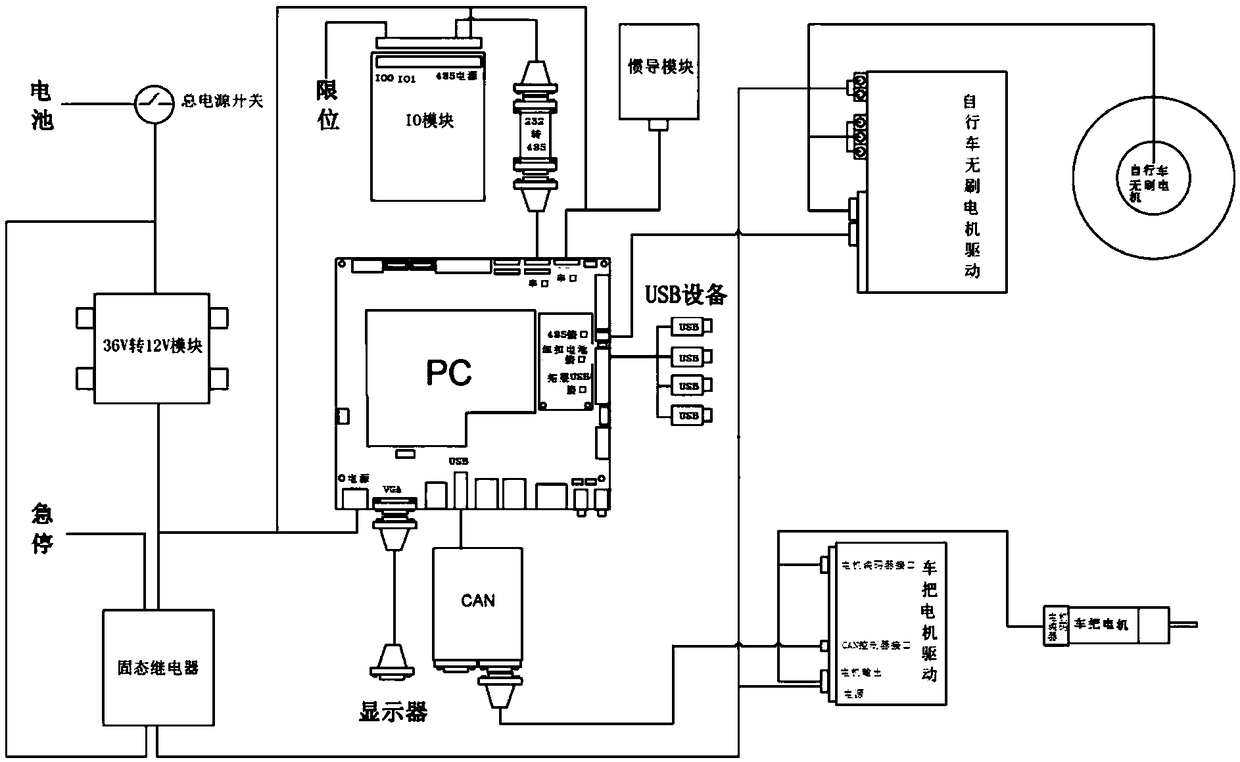
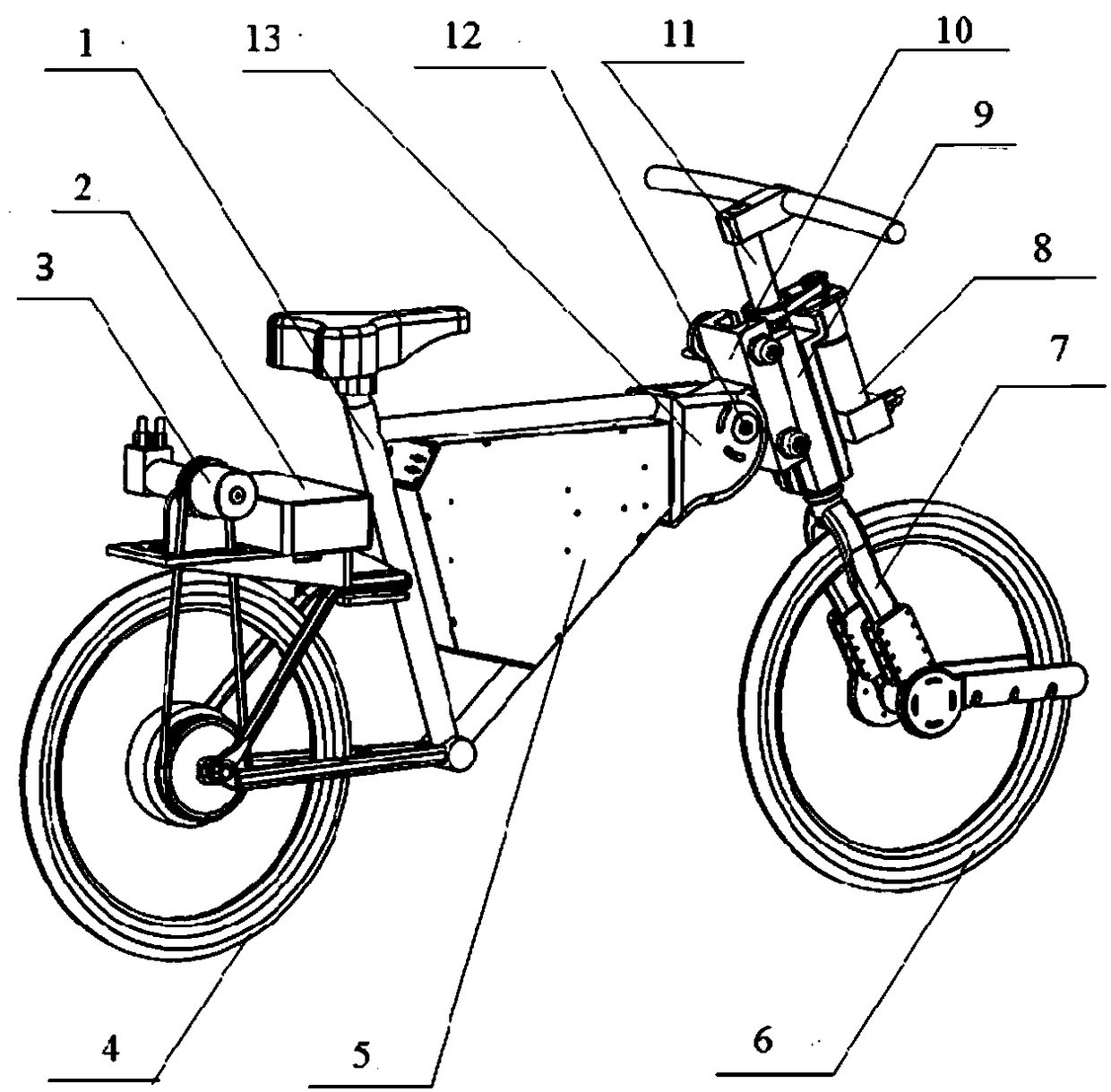
[0058] Such as figure 1 As shown, a mechanical power system for self-balancing driving bicycles includes: a mechanical system and an electrical control system. The mechanical system includes a car body, a rear wheel, a front fork and a front wheel. Computer, DC power supply, industrial computer is set in the control box, the front fork trail adjustment device and the electronic gyroscope used for vehicle body inclination detection are installed at the connection between the front fork and the car body, the electronic gyroscope is set in the control box through the serial port and Industrial computer connection; the rear wheel is equipped with a driving drive DC rear wheel servo motor and rear wheel drive device, the front wheel is equipped with a direction adjusting front fork servo motor and front wheel drive device, rear wheel drive servo motor driver, front fork drive servo The motor driver is connected with the industrial computer through the bus; the electronic gyroscope ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More