

A target detection method and device for a parallel robot vision system
A technology of robot vision and target detection, applied in the field of image processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] In order to make the purpose, technical solution and advantages of the present invention more clear and understandable, the present invention will be further described in detail below in conjunction with the accompanying drawings and technical solutions.
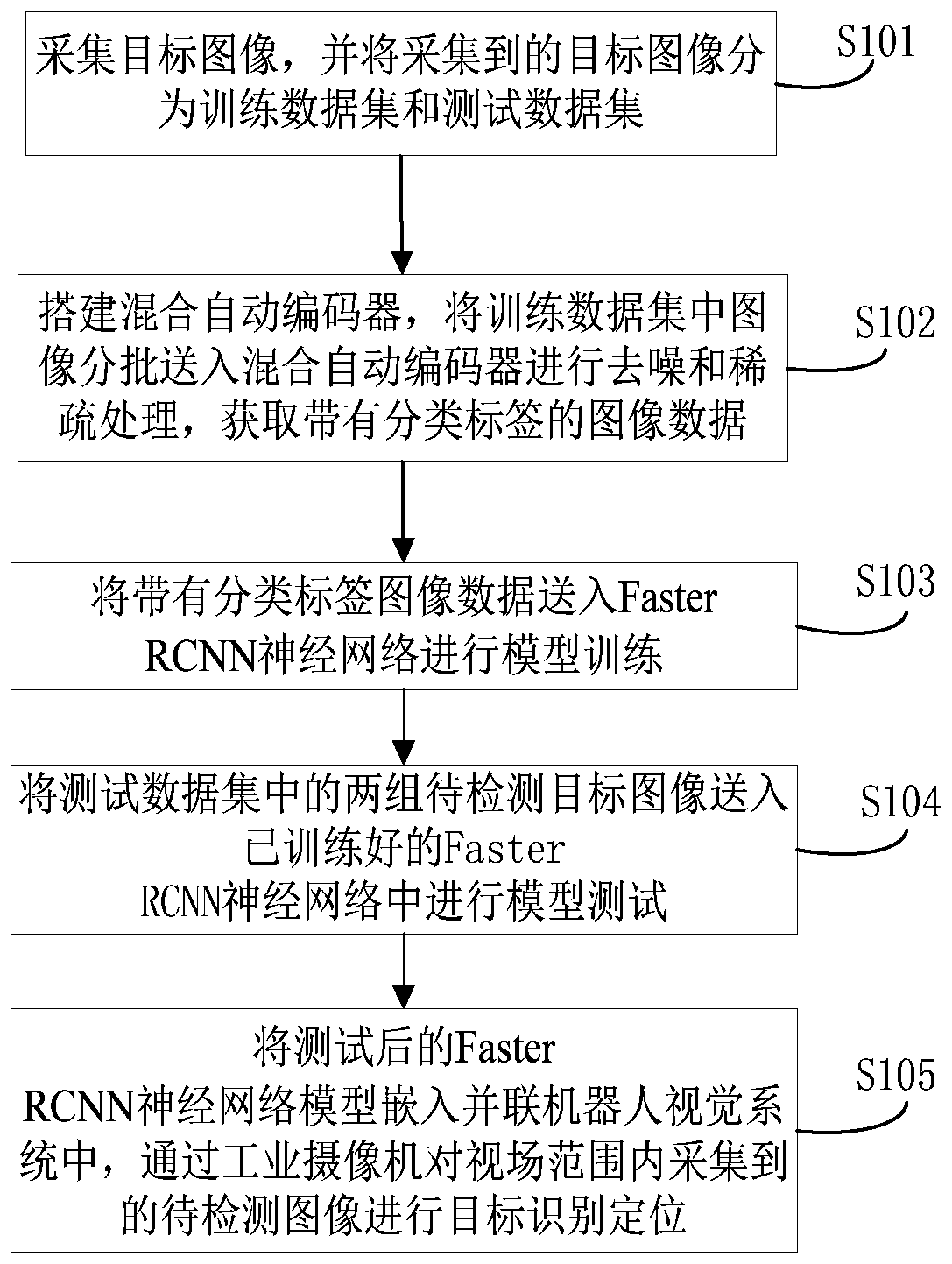
[0044] In the current image processing technology, supervised learning is used for data set training, and the early data set labeling and production will cost a lot of manpower and material resources; using unsupervised learning alone will easily cause problems such as inconvenient application to target detection and overfitting. For this reason, embodiment of the present invention, see figure 1 As shown, a target detection method for parallel robot vision system is provided, including the following content:
[0045] S101. Collect target images, and divide the collected target images into training data sets and test data sets;
[0046] S102. Building a hybrid autoencoder, sending the images in the training data set t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More