Intelligent order grabbing method and device, and computer-readable storage medium
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A single-device, intelligent technology, applied in the direction of computing, measuring devices, instruments, etc., can solve the problem of high server performance requirements, and achieve the effect of improving order receiving efficiency
Inactive Publication Date: 2020-02-28
SHENZHEN SKYWORTH DIGITAL TECH CO LTD
View PDF7 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] The main purpose of the present invention is to provide an intelligent order grabbing method, device and computer-readable storage medium, aiming to solve the technical problem of high server performance requirements in the scheduling of multiple AGV terminals
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
no. 1 example
[0102] Based on the first embodiment, the second embodiment of the intelligent order grabbing method of the present invention is proposed, referring to Figure 5 , in this embodiment, step S100 includes:
[0103] Step S110, when the first vehicle body is currently in the state of not receiving an order and order information is received, obtain the current first location information of the first vehicle body, and obtain destination location information based on the order information;
[0104] Step S120, acquiring current second position information of a third vehicle body, wherein the third vehicle body is a vehicle body other than the first vehicle body in the driving environment where the first vehicle body is located;
[0105] Step S130: Determine a first navigation route based on the first location information, the second location information, and the destination location information, and determine a first navigation duration based on the first navigation route.
[0106] W...
no. 2 example
[0135] Based on the second embodiment, the sixth embodiment of the intelligent order grabbing method of the present invention is proposed. In this embodiment, step S100 includes:
[0136] Step S140, acquiring route planning point information corresponding to the first navigation route, and determining the driving time corresponding to the first navigation route based on the route planning point information;
[0137] Step S150, based on the pose information of the first vehicle body and the initial planning point corresponding to the path planning point information, determine the pose adjustment duration corresponding to the first navigation route;
[0138] Step S160: Determine the first navigation duration based on the pose adjustment duration and the driving duration.
[0139] In this embodiment, the path planning point information corresponding to the first navigation route is obtained, and the path planning point information includes the coordinates (x N ,y N ) and the ve...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
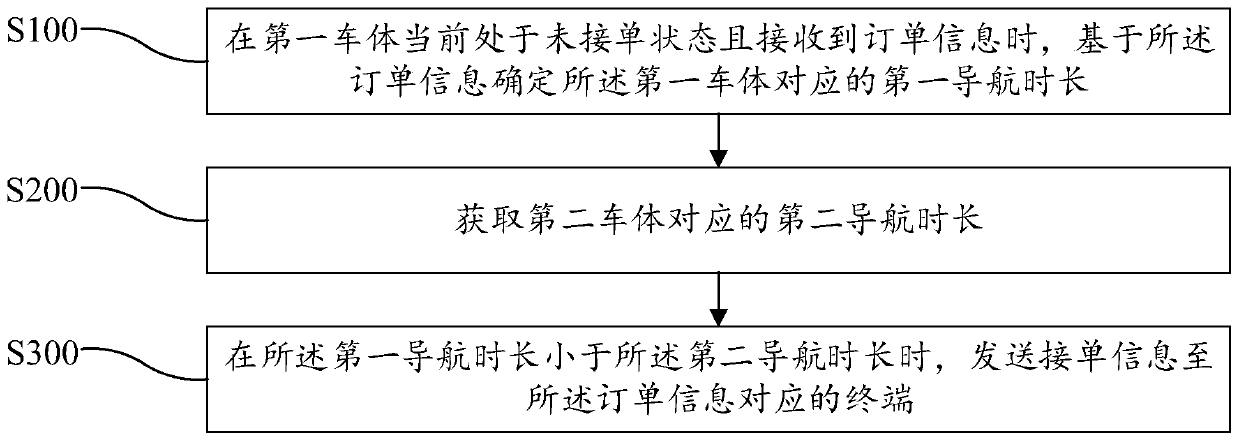
Abstract
The invention discloses an intelligent order grabbing method, comprising the following steps: determining, when a first vehicle is currently in an unordered state and receives order information, a first navigation duration corresponding to the first vehicle based on the order information; acquiring a second navigation duration corresponding to a second vehicle, wherein the second vehicle is othervehicle in an unordered state except the first vehicle in the traveling environment of the first vehicle; and sending, when the first navigation duration is shorter than the second navigation duration, order receiving information to a terminal corresponding to the order information. The invention also discloses an intelligent order grabbing device and a computer-readable storage medium. Distributed scheduling of the vehicles is realized by separately calculating the navigation duration of each vehicle, and the autonomous calculation of the navigation duration of the vehicle does not need a server with high performance requirement for to perform scheduling, thereby improving the order receiving efficiency of the vehicles.
Description
technical field [0001] The present invention relates to the technical field of intelligent driving, in particular to an intelligent order grabbing method, device and computer-readable storage medium. Background technique [0002] SLAM (simultaneous localization and mapping, real-time positioning and map construction) based on the natural environment includes two major functions: positioning and mapping. Among them, the main function of map building is to understand the surrounding environment and establish the corresponding relationship between the surrounding environment and space; the main function of positioning is to judge the position of the car body in the map according to the built map, so as to obtain information in the environment. Secondly, lidar is an active detection sensor that does not depend on external lighting conditions and has high-precision ranging information. Therefore, the SLAM method based on lidar is still the most widely used method in the robot SL...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More