

Pipeline turning angle detection method
A detection method and a technology of turning angles, which are applied in the field of pipeline surveying and mapping, can solve the problems that the detection accuracy cannot be guaranteed, the independent detection method of the pipeline detection robot has not been proposed, and the sensor requirements are very high.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
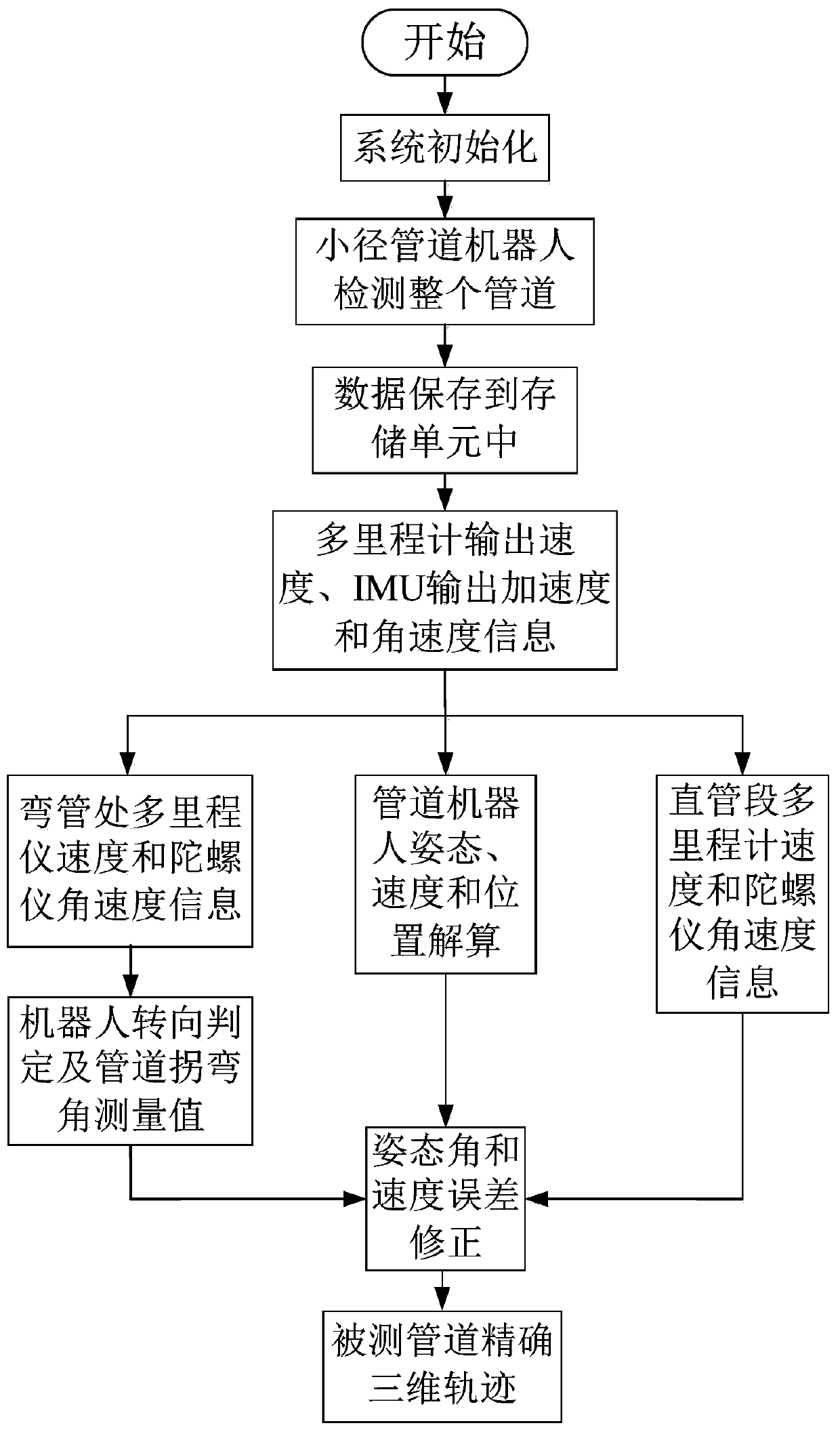
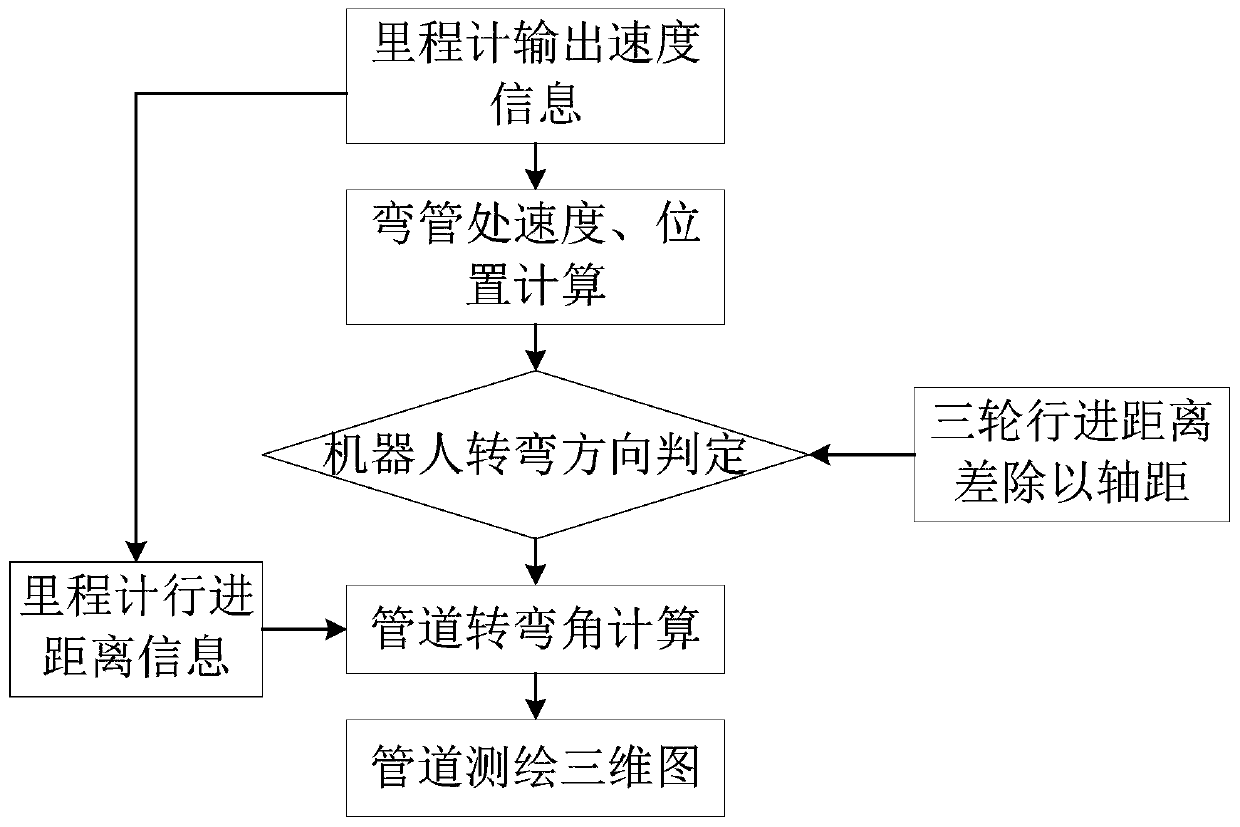
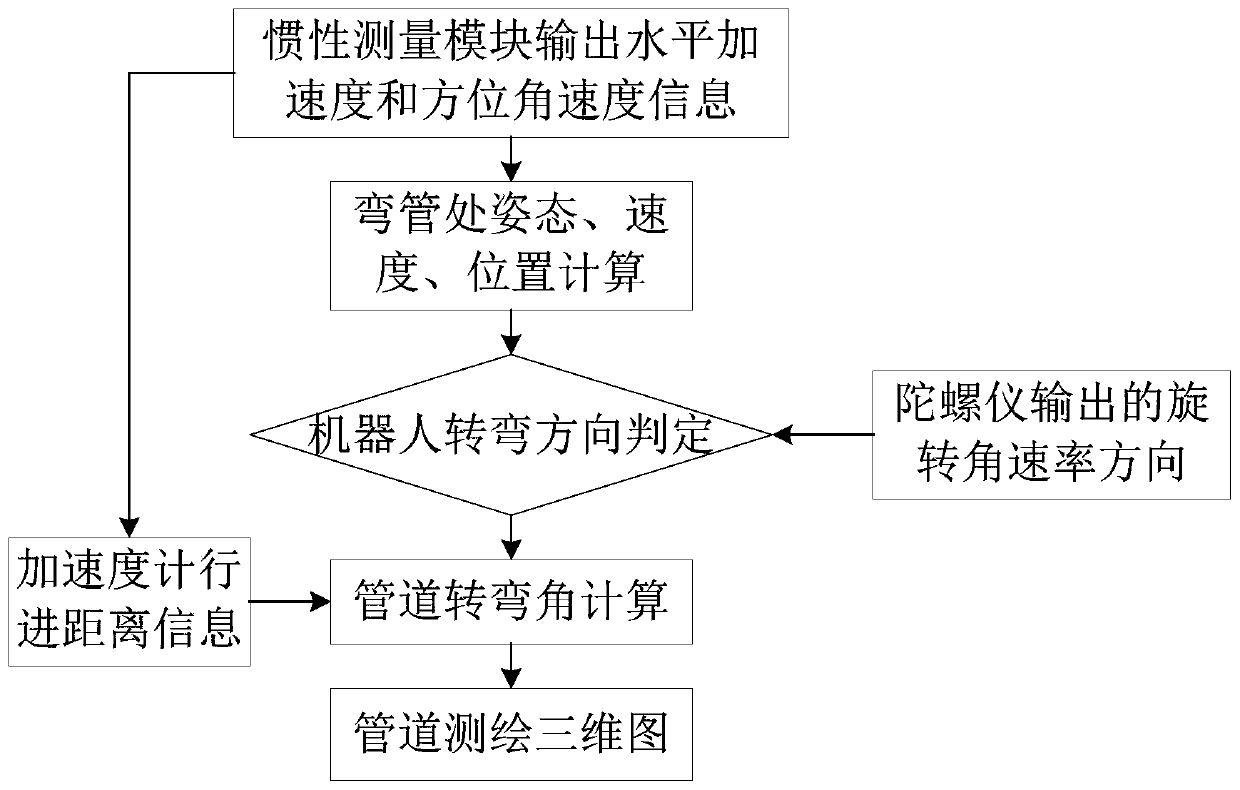
[0110] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0111] The specific detection method of the present invention includes: detecting the movement of the robot in the pipeline through a small-diameter pipeline, and using a three-axis accelerometer, a three-axis gyroscope and a multi-mileage meter to respectively collect the three-axis acceleration, three-axis angular rate and axial velocity of the small-diameter pipeline detection robot. speed. At the same time, the data processing unit processes the collected measurement values and stores them in the data storage unit. After the detection is completed, combine the output information of the three-axis accelerometer, three-axis gyroscope and multi-odometer under offline conditions, and use the strapdown inertial navigation under the condition that the initial attitude, speed and position of the small-diameter pipeline detection robot before ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More