

Path planning method for multiple unmanned aerial vehicles to arrive at designated place simultaneously in three-dimensional environment
A path planning, multi-UAV technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc., can solve the problem of lack of simultaneous arrival application background, etc., to prevent premature and partial Convergence, high track quality, and the effect of reducing the search space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
[0086] In order to verify the effectiveness of the path planning method for multiple unmanned aerial vehicles to arrive at the designated place at the same time in a three-dimensional environment, this embodiment uses the Matlab programming environment, and the relevant parameters are set as follows:
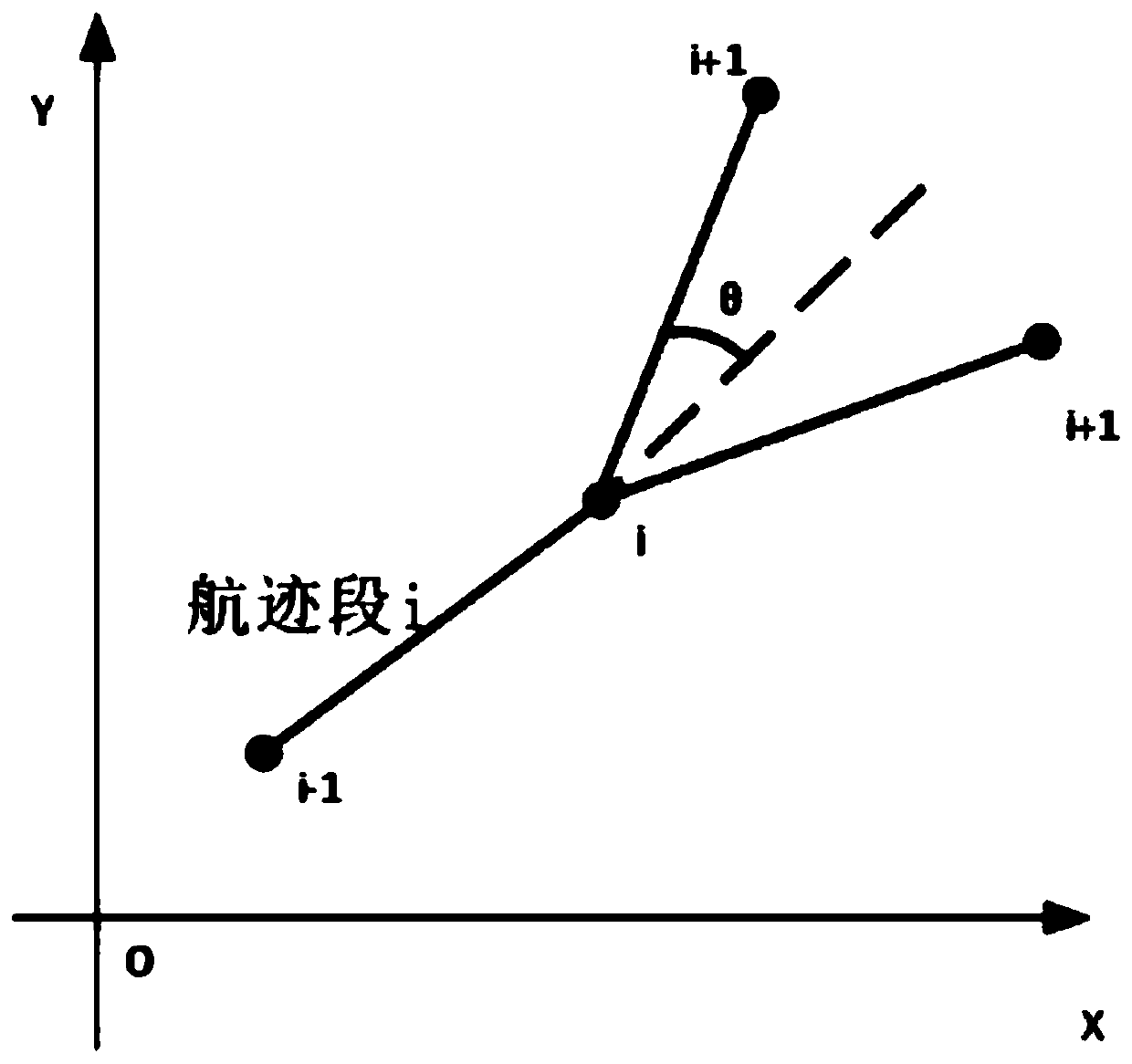
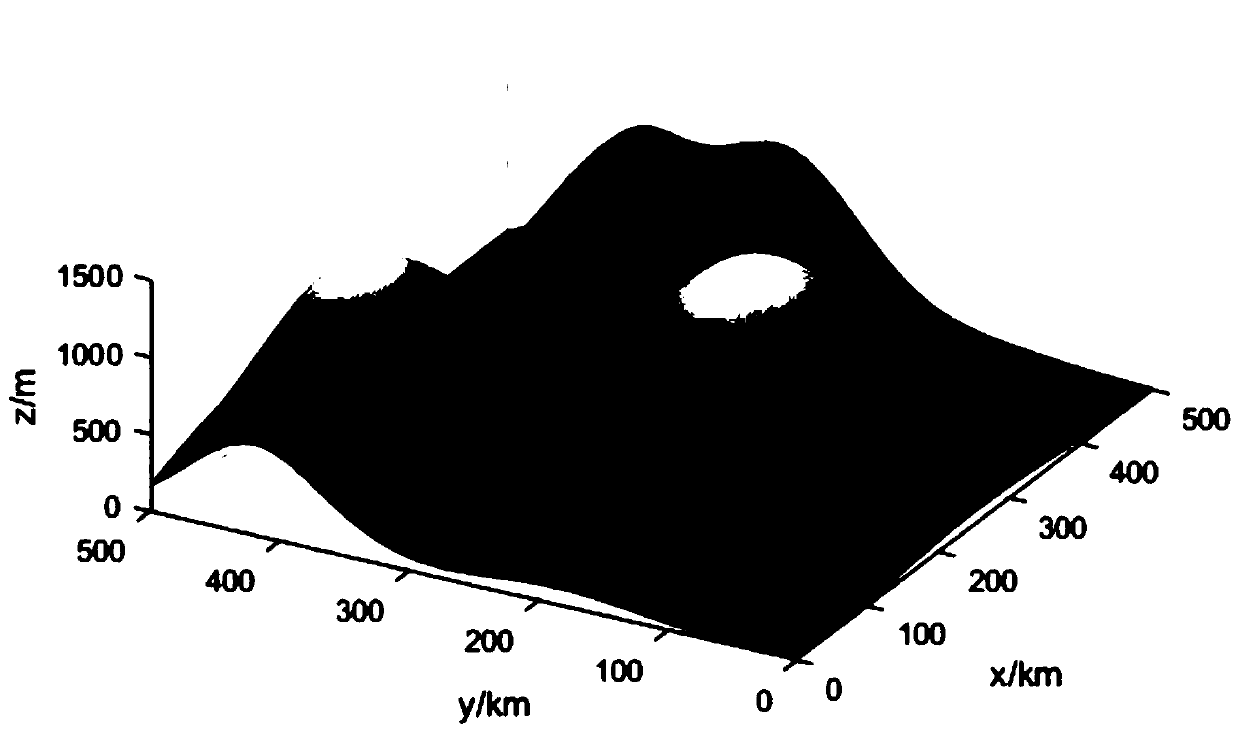
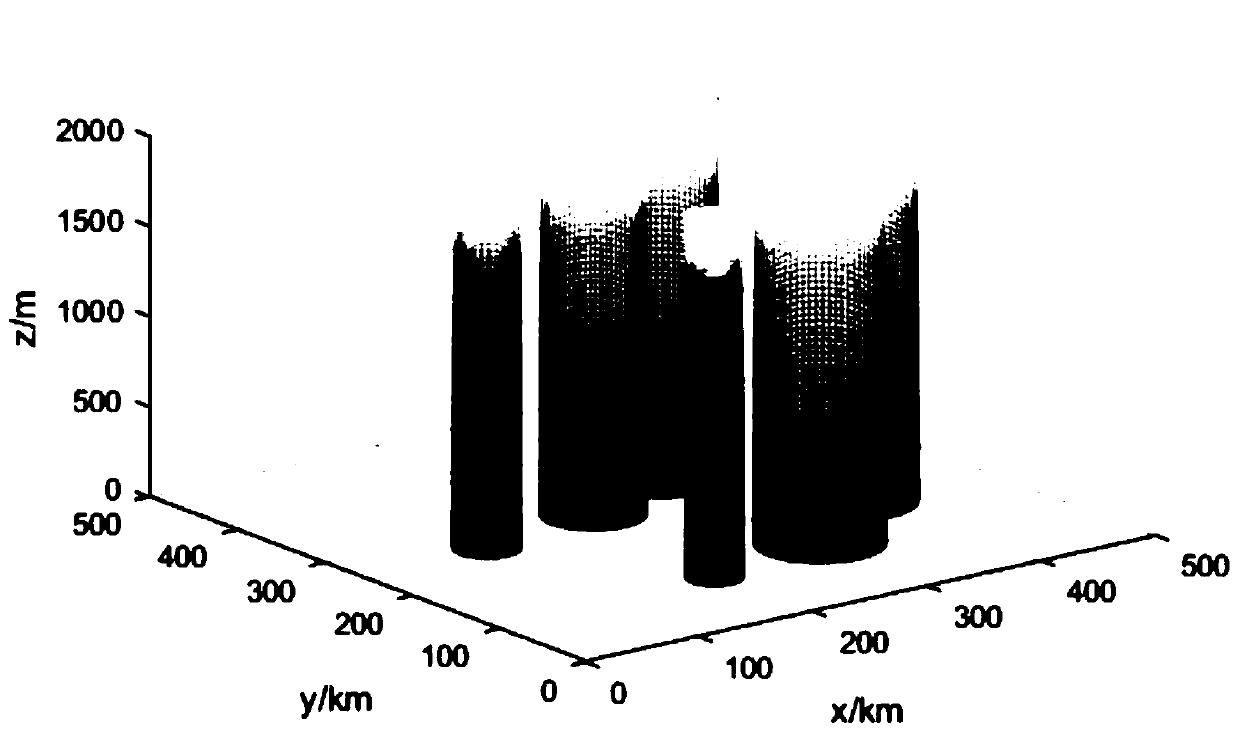
[0087] Population size: 100; maximum number of iterations: 100; maximum / minimum value of adaptive crossover probability: 0.7 / 0.1; maximum value / minimum value of adaptive mutation probability: 0.25 / 0.05; number of drones: 3; number of track segments : 5; maximum yaw angle: 60°; maximum pitch angle: 30°; minimum flight altitude: 100m; minimum turning radius: 20m; maximum flight speed: 200km / h; minimum flight speed: 50km / h; with terrain constraints Track planning is carried out in a 500km×500km×2000m three-dimensional environment threatened by the no-fly zone, and the starting point coordinates of the three drones are set to (205,59,1783), (110,122,594), (495,480,1133),
[0088] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More