

Wheeled agricultural robot with self-adaptive wheel track adjusting function and adjusting method thereof
A robot and self-adaptive technology, applied in the field of agricultural machinery, can solve the problems that small agricultural robots cannot pass, do not have self-adaptive adjustment of wheel base, and inconsistent planting row spacing, so as to reduce the phenomenon of seedling pressing, easy to operate and maintain, and widen the application. Terrain range effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0055] In order to describe the technical solution of the present invention in detail, the present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
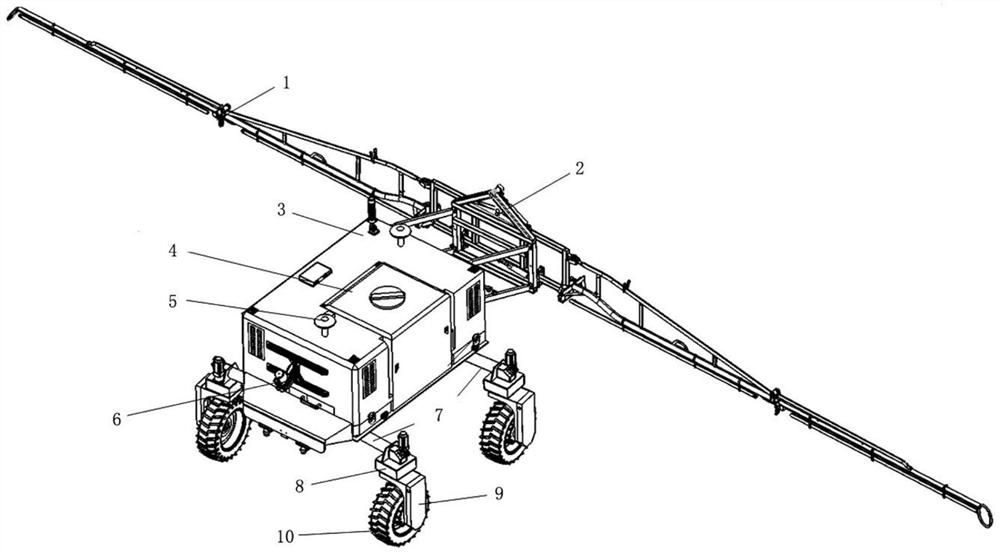
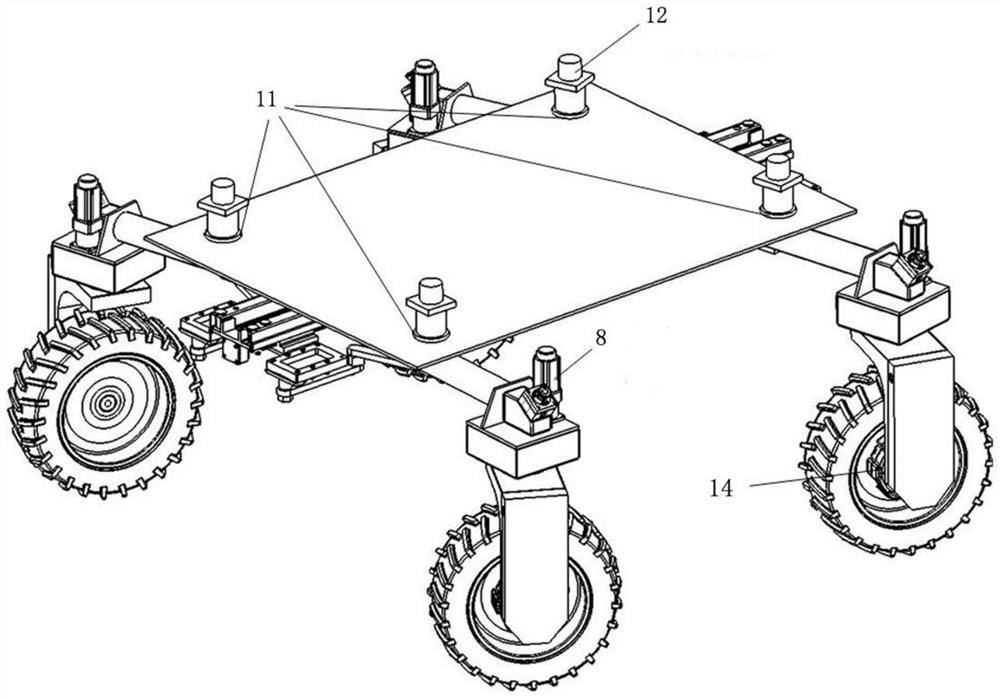
[0056] Such as figure 1 A wheeled agricultural robot with an adaptive wheelbase adjustment function shown includes a vehicle body 3, a control system, a navigation system, an actuator for wheelbase adjustment, and a pesticide application system. The car body 3 is provided with four driving wheel legs, front, rear, left and right, and the wheels 10 of each driving wheel leg are driven by an independent wheel hub motor 14, which can realize four-wheel differential speed, and each wheel 10 has an independent steering device 8. Said navigation system, wheelbase adjustment actuator, drug application system, in-wheel motor 10 and steering device 8 are respectively connected with the control system, and the start and stop are controlled by the control system.
[0057] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More