

Lane departure active correction method based on torque control
A technology of lane departure and torque control, which is applied in the field of automobile control, can solve problems affecting the quality of driving control, etc., and achieve good deviation correction effect, low memory consumption, and low calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. It should be noted here that the descriptions of these embodiments are used to help understand the present invention, but are not intended to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below may be combined with each other as long as they do not constitute a conflict with each other.
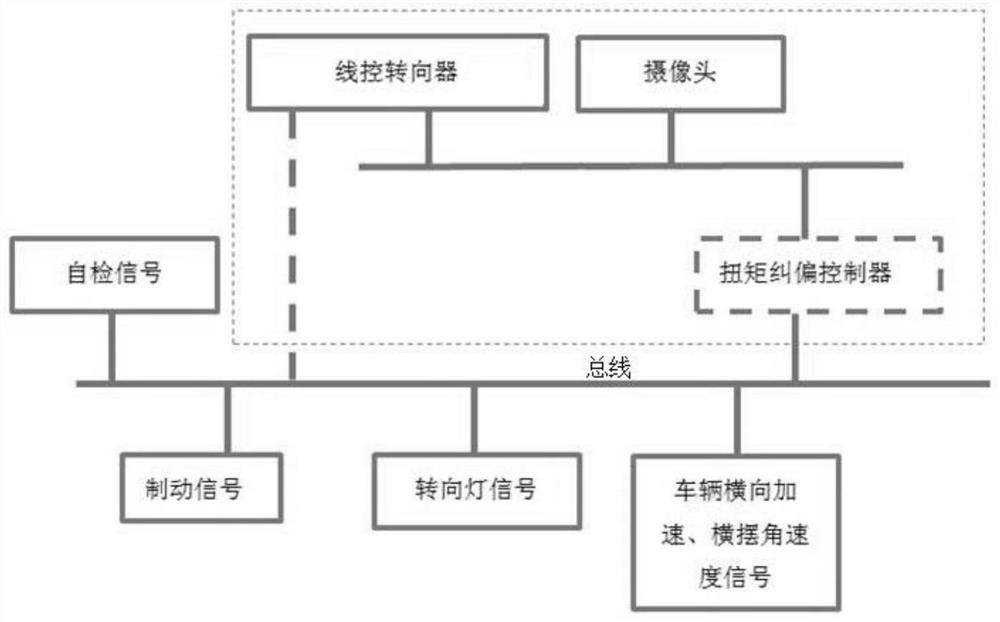
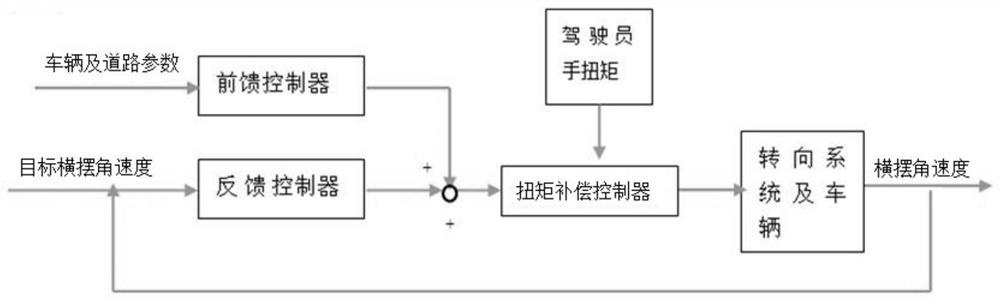
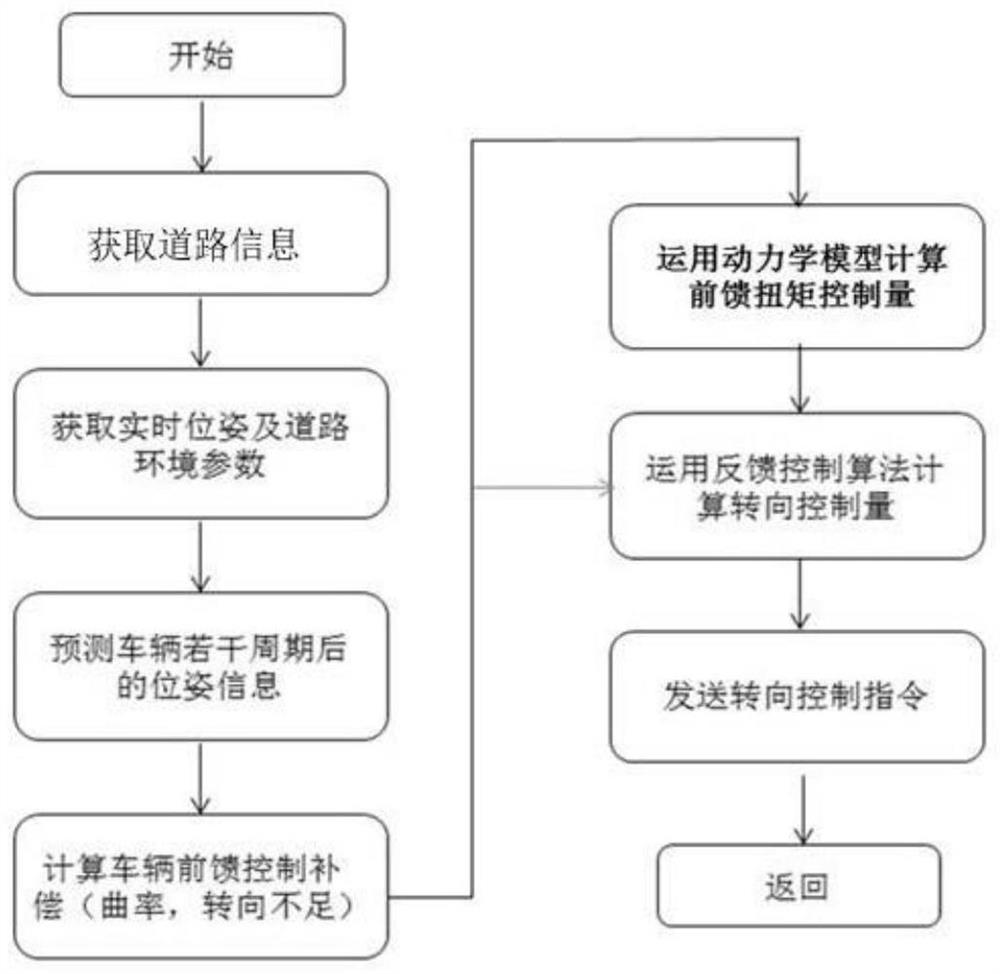
[0037] Such as Figure 1-4 As shown, the present invention proposes a lane departure active correction method controlled by the steering gear torque. During the driving process of the vehicle, road information and vehicle heading angle information are collected through a monocular camera installed on the front windshield. When the vehicle deviates from the lane When centering, the target yaw rate of vehicle deviation correction is calculated through the vehicle paramete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More