

All-terrain shock-absorbing suspension compound crawler robot mobile platform
A mobile platform and composite crawler technology, used in motor vehicles, crawler vehicles, transportation and packaging, etc., can solve the problems of crawler slack, crawler detachment, and robots not working normally, and achieve good buffering and shock absorption performance. The effect of reducing impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
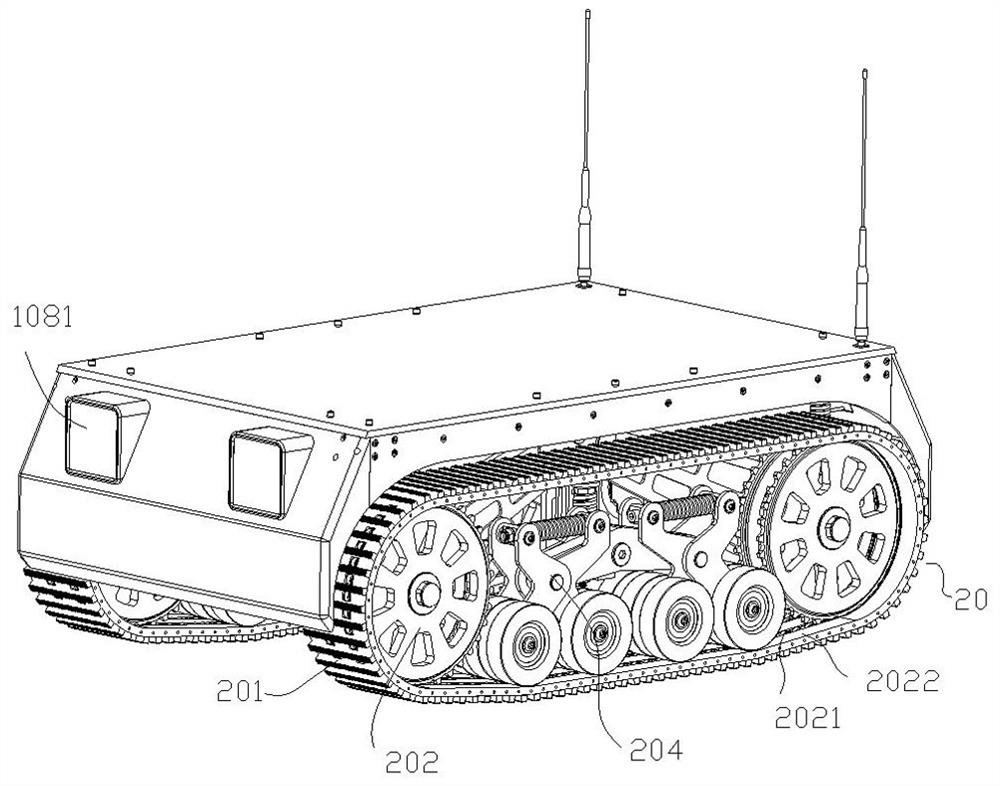
[0047] like Figure 1~Figure 9 As shown, the mobile platform of the all-terrain shock-absorbing suspension type compound crawler robot of the present disclosure can be applied to various all-terrain, stair-climbing crawler type reconnaissance and patrol robots, fire-fighting robots, EOD robots, etc. Work in harsh environments such as Gobi and river beaches.
[0048] The all-terrain shock-absorbing suspension type composite crawler robot mobile platform includes a disk frame 10 and a crawler walking mechanism 20. According to the working requirements of the robot, different control systems and carrying components can be set.
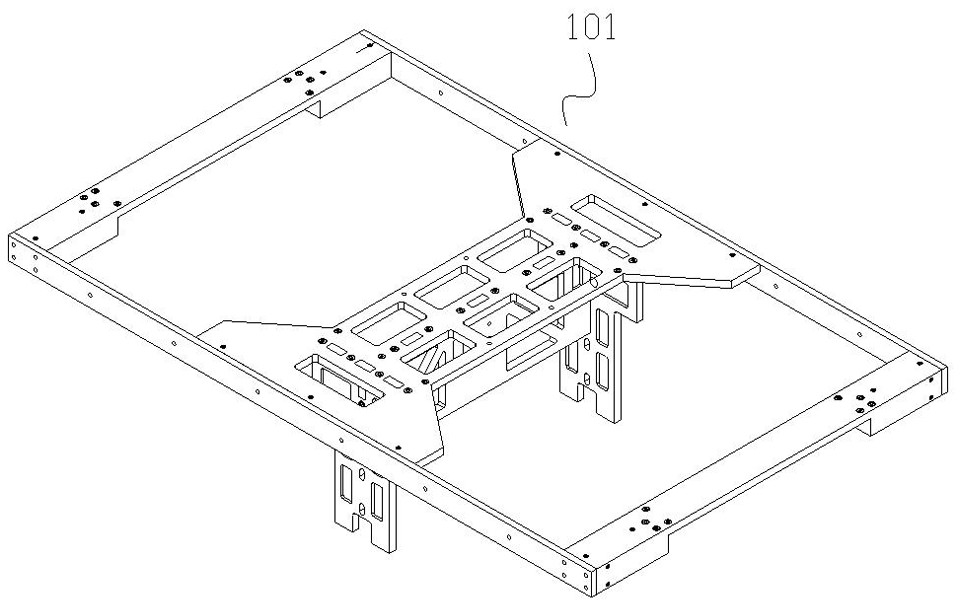
[0049] The disk rack 10 is the load-bearing part of the mobile platform of the robot, and integrates various mechanisms together. The disk rack 10 has a horizontal upper rack 101, such as image 3 As shown, the upper top frame 101 may include a rectangular frame, in order to improve the stability and practical strength of the frame, an I-shaped reinforc...
Embodiment 2
[0062] The mobile platform of the all-terrain shock-absorbing suspension type compound crawler robot of the present disclosure increases the suspension stroke of the load-bearing wheel 203 on the basis of the first embodiment.
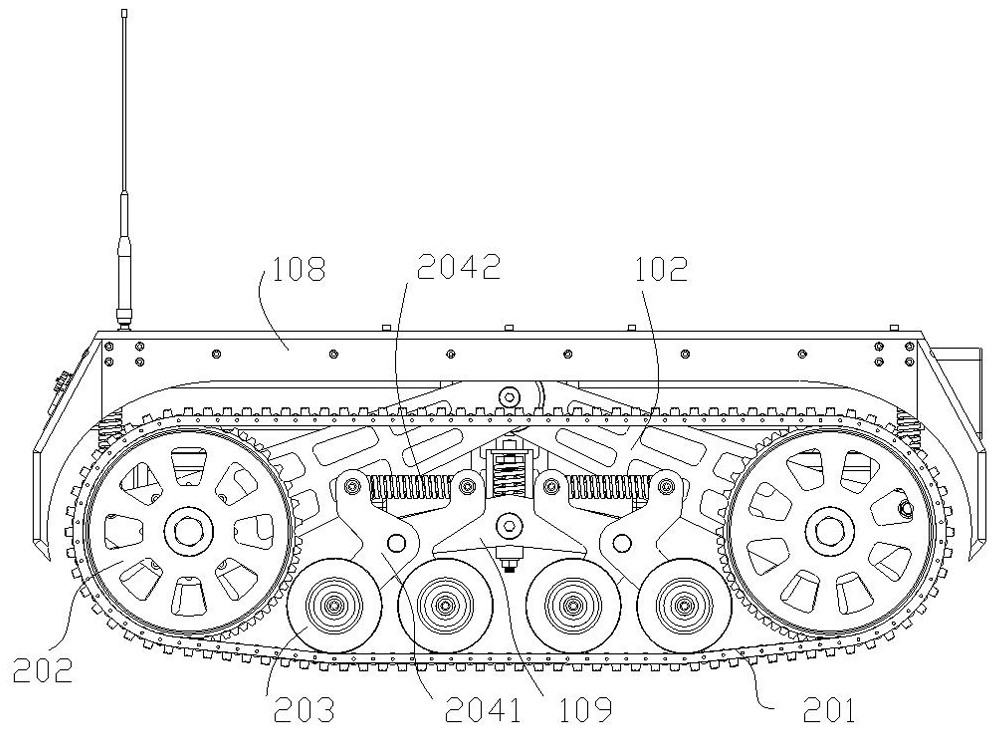
[0063] like Figure 5 As shown, the disk rack 10 further includes a horizontal bottom beam 104 that can float up and down, and the Christie hanger 204 is fixed on the bottom beam 104 .
[0064] The rotating shafts on the multiple sets of Christie suspension frames 204 are fixed on a shock-absorbing beam 109 , and the shock-absorbing beam is then fixed with the bottom beam 104 . The bottom beam 104 is fixed to the upper top frame 101 through a vertical connecting arm, and the connecting arm includes a fixing beam 105 , a mounting frame and a third elastic body 106 . The upper end of the fixed beam 105 is fixed with the upper top frame 101 , and the lower end has a gap for the bottom beam 104 to slide up and down, the gap is opened vertically downward, ...
Embodiment 3
[0069] In the mobile platform of the all-terrain shock-absorbing suspension type compound crawler robot of the present disclosure, on the basis of the first embodiment, a horizontal mounting block 107 is fixed at the lower end of the first suspension arm 102 . The first elastic body 103 includes a first spring, a first installation rod is passed through the first spring, and a hinge seat is fixed on the upper end of the first installation rod, so that the upper end of the first installation rod can be rotatably fixed to the upper top frame 101 The upper and lower ends slidably pass through the mounting block 107 , and the lower end of the first mounting rod has an external thread, the external thread is threadedly connected with a lock nut, and the lock nut is located below the mounting block 107 . The upper end of the first spring is fixed with the first installation rod, and the lower end is fixed with the installation block 107, so that the first spring can be compressed or ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More