

Upper limb exoskeleton control method and device based on voice input
A technology of voice input and exoskeleton, which is applied in the direction of program-controlled manipulators, manufacturing tools, and manipulators. It can solve problems such as unfavorable newcomers getting started quickly, complicated control methods, and difficult exoskeleton control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
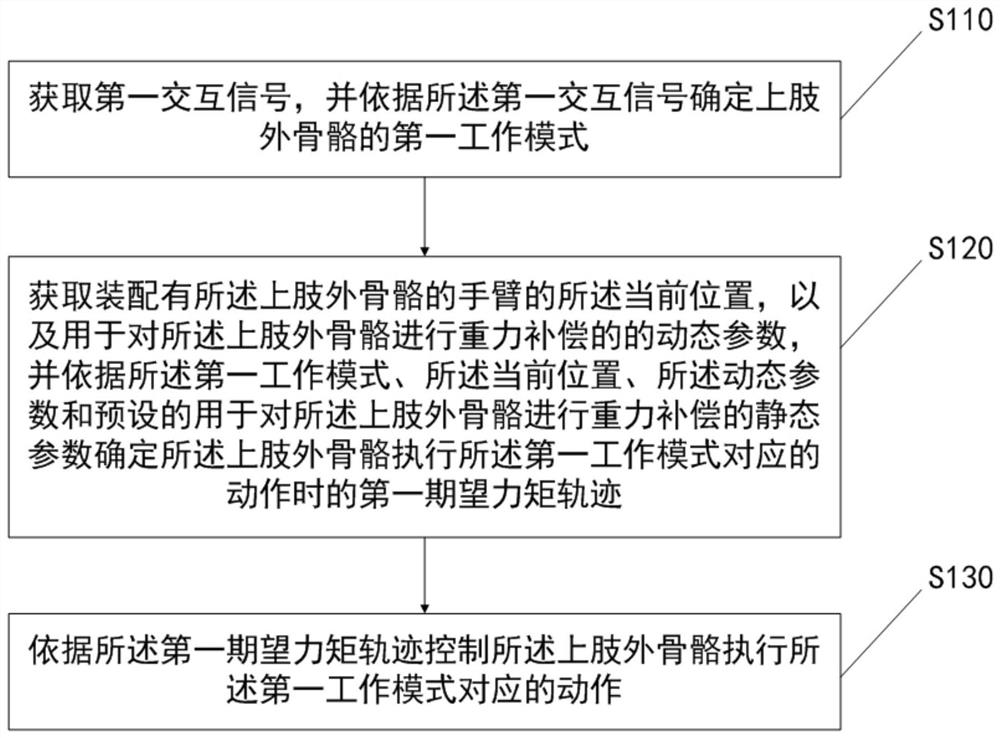
[0046] In order to make the purpose, features and advantages of the present application more obvious and understandable, the present application will be further described in detail below in conjunction with the accompanying drawings and specific implementation methods. Apparently, the described embodiments are some of the embodiments of the present application, but not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of this application.
[0047] It should be noted that, in any embodiment of the present application, the method and the device are applied to control the upper extremity exoskeleton by acquiring interaction signals generated by parts other than the wearer's upper limbs; specifically, the The above-mentioned interactive signals generated by parts other than the upper limbs may include: the interactive signals generated by the we...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More