

Robot repositioning method, device and equipment and storage medium
A robot and relocation technology, applied in the fields of instruments, image analysis, computing, etc., can solve the problems of unsuitability for widespread use and low positioning accuracy, and achieve the effect of high speed, high precision, and accelerated optimization calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
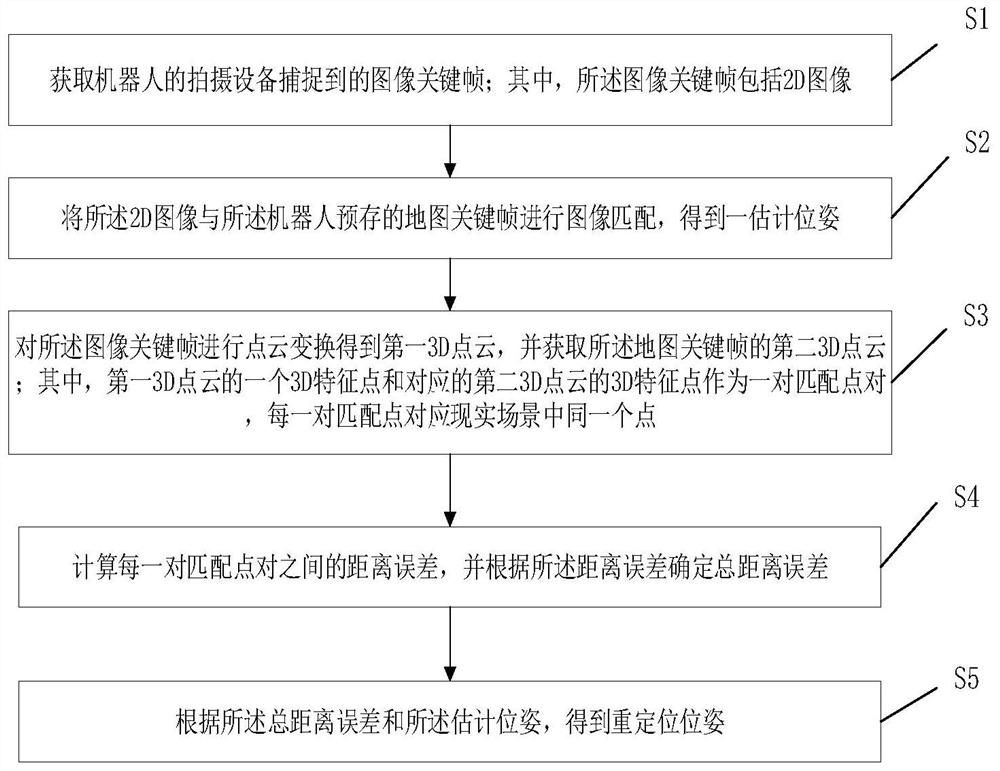
[0049] see figure 1 , which is a flowchart of a robot relocation method provided in the first embodiment of the present invention, the robot relocation method includes:
[0050] S1: Acquire image key frames captured by the shooting device of the robot; wherein, the image key frames include 2D images;
[0051]In the embodiment of the present invention, the shooting device is an RGB-D depth camera, which is used to shoot live scenes to obtain related video stre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More