

Multi-view point cloud global optimal registration method based on hierarchical closed-loop constraints
A global optimization and closed-loop technology, applied in image analysis, image enhancement, instruments, etc., can solve the problem of incomplete 3D target data and achieve the effect of reducing the average distance error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
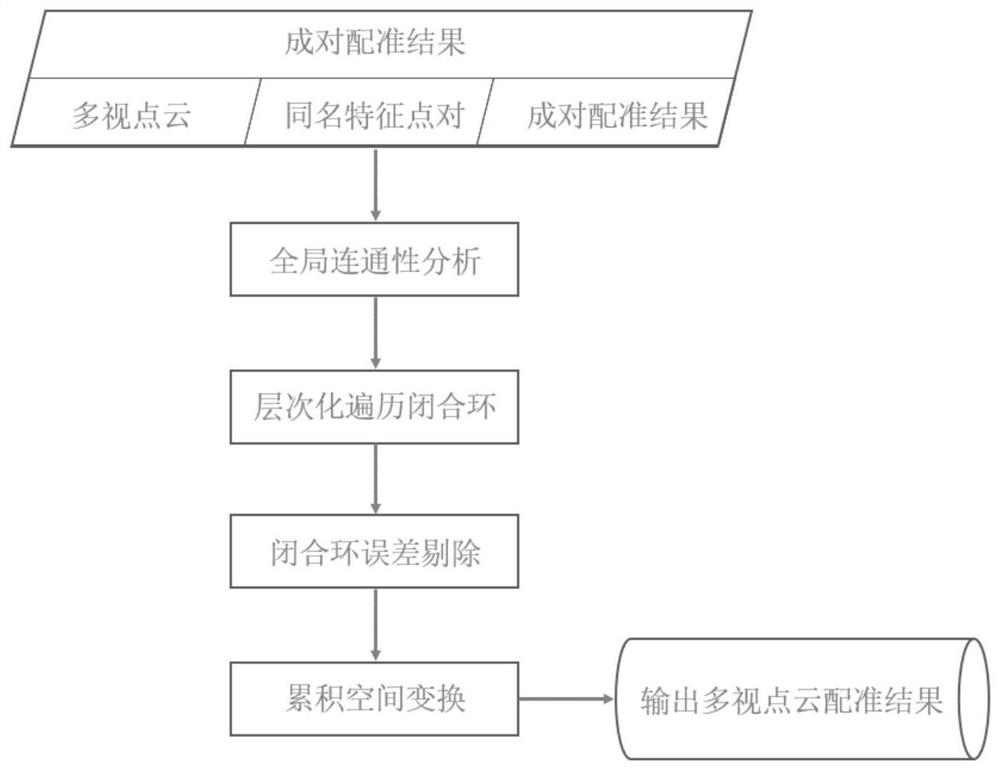
[0034]Aiming at the handheld laser scanning point clouds captured under different scanning viewing angles, the present invention proposes a method based on hierarchical closed loop constraints. Analysis and correction, and global optimization and registration method of multi-view point cloud. The overall technical process of the present invention consists of figure 1 shown. The method is divided into four key steps: global connectivity analysis, hierarchical traversal of closed loops, closed loop error elimination and cumulative spatial transformation. The specific implementation steps of this method are as follows: figure 2 shown.
[0035] Step 1, select the reference point cloud coordinate system. First, read the multi-view point cloud file, the feature point pair information of the same name extracted based on feature consistency and geometric consistency, and the pairwise registration results after closed loop gross error detection. Enter the point cloud and paired r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More